- Develop and Debug C++ for ARM Linux Boards on Windows With Eclipse
- What Experience Do You Get
- System Preparation
- Software Requirement on the ARM Linux Device
- Software Requirement on the Windows PC:
- Prepare the Windows PC
- Prepare the ARM Linux Board
- Develop a Program
- Deploy and Debug the Program
- Further Reading
- Saved searches
- Use saved searches to filter your results more quickly
- mkende/cygwin-arm-toolchain
- Name already in use
- Sign In Required
- Launching GitHub Desktop
- Launching GitHub Desktop
- Launching Xcode
- Launching Visual Studio Code
- Latest commit
- Git stats
- Files
- README.md
Develop and Debug C++ for ARM Linux Boards on Windows With Eclipse
Join the DZone community and get the full member experience.

Learn more about developing and debugging ARM Linux Boards on Windows
You can have a complete development environment on a Windows PC to create and debug C++ programs for Raspberry Pi, BeagleBone, and other Linux devices.
All activities happen within Eclipse: build the executable, deploy it to your ARM device, and remotely debug it. In this post, we look at how to do all three, so without further ado, let’s get started!
What Experience Do You Get
- Code can be written in Eclipse
- Compilation and linking for the ARM Linux target happen when building the project.
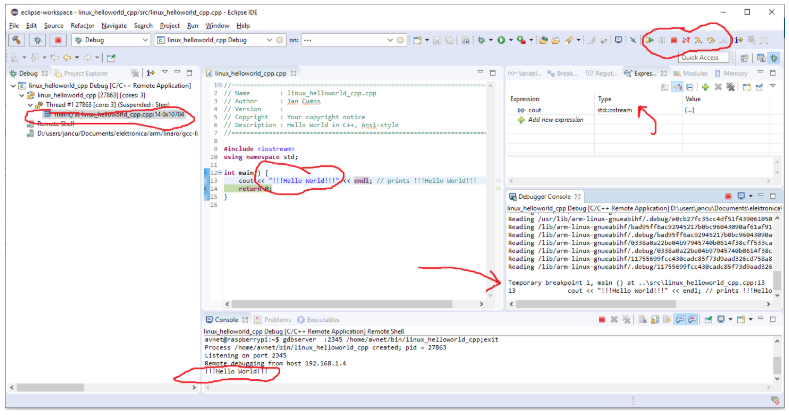
- When a debug session is started, the executable is deployed to the Linux device and the remote debugger is automatically started. Source code is loaded in the editor and the execution halts at main() .
- You can step over and into the code, show assembly, watch variables and expressions, and set breakpoints.
- You see the standard output generated by your executable in Eclipse.
- When debugging is finished, the remote debug server on the ARM device closes.
System Preparation
Software Requirement on the ARM Linux Device
Software Requirement on the Windows PC:
Prepare the Windows PC
Download and install the arm-linux cross-compile toolchain. The package is available as a compressed archive. You can extract it to a location of choice.
Check your board documentation for the right one. I selected gcc-linaro-5.3-2016.02-i686-mingw32_arm-linux-gnueabihf to work with BeagleBone, Raspberry Pi and Hartung Mica
When you unpack it, take care that you start the unzip utility (I use 7-Zip) with administrator rights. That’s needed to get the correct symbolic links created during the extract.
If you use 7-zip, you can do this by looking for the 7-Zip File Manager entry in Windows’ start menu, right-click on it, and then select Execute as Administrator. Then, you navigate to the archive and extract it. This will give you a working cross-compilation toolset.
Then download and install the latest Eclipse. This also comes as an archive. Unpack that one (admin rights are not needed), also to a location of choice.
The setup on Windows is now complete.
Prepare the ARM Linux Board
Log on to Linux and check if the debug server is installed:
Create a working directory where Eclipse can deploy and run your developments. I prefer to have it in my home folder. You are free to choose the name for that directory. I called it ~/bin .
The setup on your ARM Linux device is now complete.
Develop a Program
Open Eclipse by double-clicking eclipse.exe in the folder where you installed it.
Accept or change the suggested Working Folder location. Your projects will be stored there.
File -> New -> Project
- Search for C++ Project and select it.
- Project Name: helloworld
- Use default location
- Project type: Hello World C++ Project
- Toolchain: Cross GCC
Next -> Next-> Next
- Cross-compiler path: Browse the bin subdirectory of the location where you unpacked the toolchain
- Cross compiler prefix: arm-linux-gnueabihf-
The prefix is the fixed begin of the filename for most programs in the toolchain’s bin directory (e.g.: arm-linux-gnueabihf-gcc.exe)
- If asked to ‘Open Perspective,’ do that (normally, this is only asked the first time you create this type of project).
- You may get two errors in the ‘Problems’ view. We don’t need those.
Right Click on the Errors label -> Select All
Right Click on the Errors label Again -> Delete
Right-click on the project name -> Properties -> C/C++ Build -> Builder Settings
Apply and Close
Right-click on the project name -> Build Project
16:56:52 **** Incremental Build of configuration Debug for project helloworld **** Info: Internal Builder is used for build arm-linux-gnueabihf-g++ -O0 -g3 -Wall -c -fmessage-length=0 -o "src\\helloworld.o" "..\\src\\helloworld.cpp" arm-linux-gnueabihf-g++ -o helloworld "src\\helloworld.o" 16:56:53 Build Finished. 0 errors, 0 warnings. (took 808ms)Deploy and Debug the Program
Run -> Debug Configurations
Right-click on C/C++ Remote Application -> New configuration
Project -> Browse -> helloworld
Connection -> New -> SSH -> OK
- Connection Name: how you name your Linux board, e.g. raspberrypi
- Host: network address or IP of the Linux device
- User: your Linux account
- Password-based authentication ->Password
Remote Absolute File Path for C/C++ Applications -> Browse
- This opens your home folder on the Linux device.
- Select the development folder you created and confirm (the one I called bin in the preparation steps). If the application name is not shown in the entry field, add /helloworld
Debugger tab -> Debugger Options -> Main
- GDB debugger: Browse the bin subdirectory of the location where you unpacked the toolchain, then select the program that ends with gdb.exe (in my case: arm-linux-gnueabihf-gdb.exe)
Apply -> Debug
You are now debugging your application. It runs on the Linux device but you control it from your Windows machine. Enjoy!
Further Reading
Opinions expressed by DZone contributors are their own.
Saved searches
Use saved searches to filter your results more quickly
You signed in with another tab or window. Reload to refresh your session. You signed out in another tab or window. Reload to refresh your session. You switched accounts on another tab or window. Reload to refresh your session.
Build a full embedded ARM toolchain on Windows using Cygwin
mkende/cygwin-arm-toolchain
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
Name already in use
A tag already exists with the provided branch name. Many Git commands accept both tag and branch names, so creating this branch may cause unexpected behavior. Are you sure you want to create this branch?
Sign In Required
Please sign in to use Codespaces.
Launching GitHub Desktop
If nothing happens, download GitHub Desktop and try again.
Launching GitHub Desktop
If nothing happens, download GitHub Desktop and try again.
Launching Xcode
If nothing happens, download Xcode and try again.
Launching Visual Studio Code
Your codespace will open once ready.
There was a problem preparing your codespace, please try again.
Latest commit
Git stats
Files
Failed to load latest commit information.
README.md
Building a full embedded ARM toolchain on Windows using Cygwin
This tool can be used to build a full ARM toolchain under Cygwin. The tool initially had patch files specific to build on Cygwin, but these bugs were fixed in recent version of the GNU tools so this program is actually not specific to Cygwin in its current state. So it can maybe be used on other platforms. But these other platforms usually have pre-packaged version of the toolchain that will be more conveniant to use (and this tool is tested only under Cygwin).
The toolchain built by this tool have been used to build programs for the Raspberry Pi RP2040 using the Pico SDK and for various Atmel SAMD devices using the Atmel Start framework.
For peoples that have or prefer to use Windows, there are these days many options (full virtualization, Windows Subsystem for Linux, native toolchains, etc.). However, I find that Cygwin has the best balance between a Linux look-and-feel and a good and fast integration with the standard Windows system.
Within Cygwin, it would be possible to use a Windows toolchain. However a Cygwin native one is much simpler to use (no complex file path conversion) and usually compatible with more open source projects and tools.
To build the toolchain, you will need the following package from the Cygwin installer:
- gcc-core
- gcc-g++
- make
- bison
- flex
- perl
- patch
- git
- libgmp-devel
- libmpfr-devel
- zlib-devel
- libmpc-devel
- libisl-devel
- libexpat-devel
You can then clone the repository as well as the submodules containing the required sources. This might take a couple of minutes as the dependencies are quite large:
git clone https://github.com/mkende/cygwin-arm-toolchain.git cd cygwin-arm-toolchain git submodule update --init Just run the ./build-toolchain command. This will build and install a complete ARM toolchain in your Cygwin environment. By default the toolchain is installed under /usr/local/bin which should already be in your $PATH variable.
The build operation is organized in projects that you can individually activate or deactivate, although you should generally just build everything with the default options. The projects, all targetted to the ARM architecture, are the following:
- binutils : a standard set of GNU tools (the most important ones are the linker ld and the debugger gdb ). These tools are running on your computer so they are built with your default GCC.
- gcc-bootstrap : a bootstrap version of the GCC compiler with only the support for C. This is skipped if there is already an ARM GCC available on the system (typically from a previous run).
- newlib : a small standard library, meant for embedded systems.
- gcc : the full version, with support for C and C++. It requires newlib to be built.
- newlib-nano : an even smaller version of newlib .
- newlib-final : just the same as newlib but built again with our full gcc . This is skipped if gcc-bootstrap was built too (as newlib was built with the same version of GCC in that case).
You can execute ./build-toolchain -h to see a list of options affecting the program.
Just delete the build directory within the project to remove all build artifacts. If you use the —build-here argument then, obviously, you should remove any directories you used to build.
The various projects that are built are not always tested with Cygwin so they may fail to build. By using the versions specified in this repository you should be using known-good versions (you are getting them by default when this repository is cloned). If needed patches will be provided with this tool to allow a successful compilation under Cygwin.