Arm programming with linux
Наиболее популярным способом компиляции программ на языке ассемблера ARM64 представляет применение компилятора GAS от проекта GNU. Под Linux есть ряд различных пакетов, в рамках которых распространяется этот компилятор. Выбор конкретного пакета зависит от того, под какую архитектуру мы собираемся компилировать приложение.
Если мы собираемся компилировать приложение непосредственно под Linux (в том числе под Android), то самым простым вариантом является использование пакета gcc-aarch64-linux-gnu . Рассмотрим его использование. Вначале установим пакет командой:
sudo apt-get install gcc-aarch64-linux-gnu
После установки нам станет доступно приложение aarch64-linux-gnu-as , которое представляет компилятор GAS для ARM64 под Linux. Кроме того, также будет доступен линкер в виде приложения aarch64-linux-gnu-ld . Например, проверим версию компилятора gas:
eugene@Eugene:~$ aarch64-linux-gnu-as --version GNU assembler (GNU Binutils for Ubuntu) 2.38 Copyright (C) 2022 Free Software Foundation, Inc. This program is free software; you may redistribute it under the terms of the GNU General Public License version 3 or later. This program has absolutely no warranty. This assembler was configured for a target of `aarch64-linux-gnu`. eugene@Eugene:~$
В системе можно также найти компилятор и линкер в папке usr\aarch64-linux-gnu\bin , где они называются соответственно as и ld .
Создание первой программы
Теперь напишем первую простейшую программу, которая просто будет выводить на консоль некоторую строку. Для этого создадим в каталоге пользователя какой-нибудь каталог, например, arm . Создадим в этого каталоге новый файл hello.s (обычно файлы с кодом ассемблера arm имеют расширение .s ). Определим в этом файл следующий код:
.global _start // устанавливаем стартовый адрес программы _start: mov X0, #1 // 1 = StdOut - поток вывода ldr X1, =hello // строка для вывода на экран mov X2, #19 // длина строки mov X8, #64 // устанавливаем функцию Linux svc 0 // вызываем функцию Linux для вывода строки mov X0, #0 // Устанавливаем 0 как код возврата mov X8, #93 // код 93 представляет завершение программы svc 0 // вызываем функцию Linux для выхода из программы .data hello: .ascii "Hello METANIT.COM!\n" // данные для вывода
Для большего понимания я снабдил программу комментариями. GNU Assembler использует тот же самый синтаксис комментариев, что и C/C++ и другие си-подобные языки: одиночный комментарий начинается с двойного слеша // . Также можно использовать многострочный комментарий с помощью символов /∗ и ∗/ , между которыми помещается текст комментария ( /* текст комментария */
Вначале надо указать линкеру (в нашем случае программа ld) стартовую точку программы. В данной программе стартовая точка программы проецируется на метку _start . И чтобы линкер получил к ней доступ, определяет _start в качестве глобальной переменной с помощью оператора global .
Одна программа может состоять из множества файлов, но только один из них может иметь точку входа в программу _start
Далее идут собственно действия программы. Вначале вызывается инструкция mov , которая помещает данные в регистр.
Значения X0-X2 представляют регистры для параметров функции в Linux. В данном случае помещаем в регистр X0 значение «#1». Операнды начинаются со знака «#» Число 1 представляет номер стандартного потока вывода «StdOut».
Далее загружаем в регистр X1 адрес строки для вывода на экран с помощью инструкции ldr
Затем также с помощью инструкции mov помещаем в регистр X2 длину выводимой строки
Для любого системного вызова в Linux параметры помещаются в регистры X0–X7 в зависимости от количества. Затем в регистр X0 помещается код возврата. А сам системный вызов определяется номером функции из регистра X8. Здесь помещаем в X8 функцию с номеро 64 (функция write )
Далее выполняем системный вызов с помощью оператора svc
Операционная система, используя параметры в регистрах и номер функции, выведет строку на экран.
После этого нам надо выйти из программы. Для этого помещаем в регистр X0 число 0
А в регистр X8 передаем число 93 — номер функции для выхода из программы (функция exit )
И с помощью svc также выполняем функции. После этого программа должна завершить выполнение.
В самом конце программы размещена секция данных
.data hello: .ascii "Hello METANIT.COM!\n" // данные для вывода
Оператор .data указывает, что дальше идет секция данных. Выражение .ascii выделяет память и помещает в нее указанную далее строку.
Строка завершается символом перевода строки «\n», чтобы не надо было нажимать на Return, чтобы увидеть текст в окне терминала.
Компиляция приложения
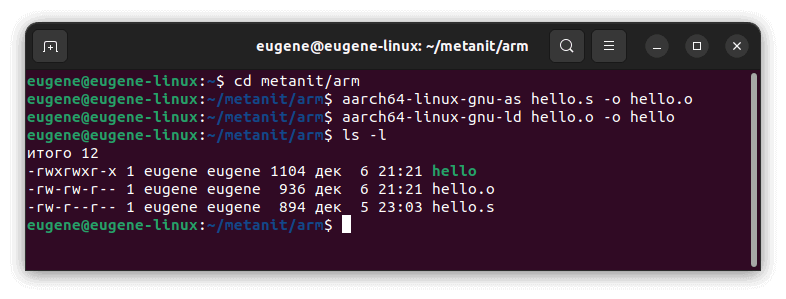
Для компиляции приложения откроем терминал/командную строку и командой cd перейдем к папке, где расположен файл hello.s с исходным кодом программы. И для компиляции выполним команду:
aarch64-linux-gnu-as hello.s -o hello.o
Компилятору aarch64-none-elf-as в качестве параметра передается файл с исходным кодом hello.s. А параметр -o указывает, в какой файл будет компилироваться программа — в данном случае в файл hello.o. Соответственно в папке программы появится файл hello.o
Затем нам нужно скомпоновать программу с исполняемый файл с помощью линкера aarch64-none-elf-ld командой:
aarch64-linux-gnu-ld hello.o -o hello
После этого в папке программы появится исполняемый файл hello, который мы можем запускать на устройстве с архитектурой ARM64 под управлением Linux.
Установка Arm GNU Toolchain
Выше рассматривалась компиляция с помощью компилятора и линкера из пакета gcc-aarch64-linux-gnu . Этот пакет применяется для компиляции программы, которая выполняется напосредственно на Linux (на arm-архитектуре). Но кроме этого, мы можем использовать непривязанные к определенной системе пакеты (то что называется bare metall ). Одним из наиболее популярных подобных пакетов является комплект инструметов Arm GNU Toolchain , который можно найти на странице https://developer.arm.com/downloads/-/arm-gnu-toolchain-downloads. Здесь представлены поседние версии Arm GNU Toolchain для разных архитектур.
Каждая версия Arm GNU Toolchain привязана к определенной версии компиляторов GCC. Например, версия Arm GNU Toolchain 12.2.Rel1 привязан к версии 12.2 набора компиляторов gcc.
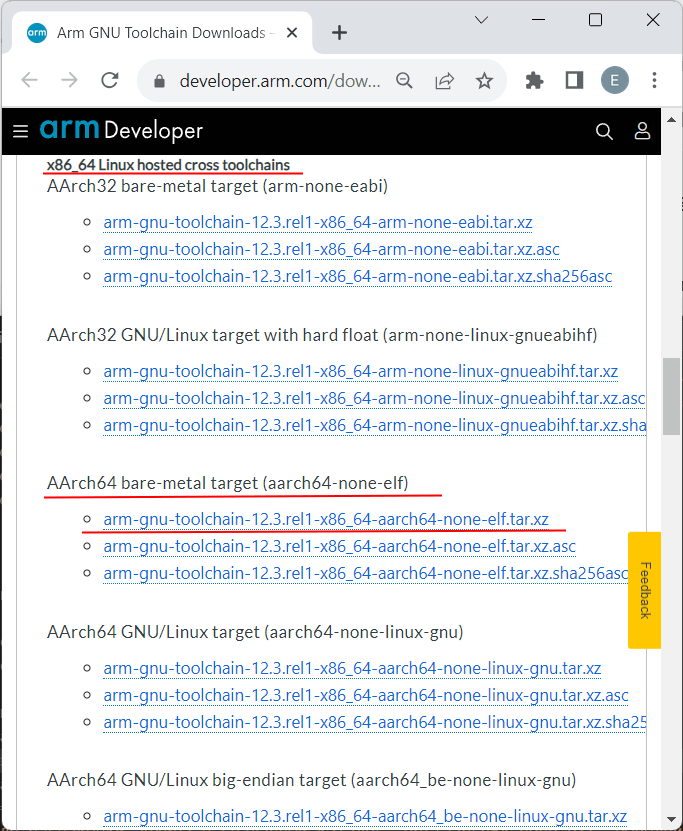
Для Linux есть пакеты, которые можно использовать как на архитектуре x86-64, так и на ARM64. Доступно несколько групп пакетов под различные архитектуры. Так, для архитектуры x86-64 доступны следующие пакеты:
- AArch32 bare-metal target (arm-none-eabi) : для компиляции программ под 32-битные архитектуры без привязки к конкретной операционной системе
- AArch32 GNU/Linux target with hard float (arm-none-linux-gnueabihf) : для компиляции программ под 32-битную ОС Linux
- AArch64 bare-metal target (aarch64-none-elf) : для компиляции программ под 64-битные архитектуры без привязки к конкретной операционной системе
- AArch64 GNU/Linux target (aarch64-none-linux-gnu) : для компиляции программ под 64-битную ОС Linux
- AArch64 GNU/Linux big-endian target (aarch64_be-none-linux-gnu) : то же самое, что и предыдущий пункт, только с использованием порядка байтов Big Indian
Для архитектуры AArch64 (ARM64) доступны следующие пакеты:
- AArch32 bare-metal target (arm-none-eabi) : для компиляции программ под 32-битные архитектуры без привязки к конкретной операционной системе
- AArch32 GNU/Linux target with hard float (arm-none-linux-gnueabihf) : для компиляции программ под 32-битную ОС Linux
- AArch64 bare-metal target (aarch64-none-elf) : для компиляции программ под 64-битные архитектуры без привязки к конкретной операционной системе
Поскольку в нашем случае мы работаем с ARM64, то нас интересуют прежде всего пакеты AArch64 bare-metal target (aarch64-none-elf) и AArch64 GNU/Linux target (aarch64-none-linux-gnu) . Второй пакет — AArch64 GNU/Linux target (aarch64-none-linux-gnu) в принципе аналогичен выше рассмотренному пакету gcc-aarch64-linux-gnu — используется только для компиляции под Linux. А первый пакет AArch64 bare-metal target (aarch64-none-elf) не привязан к определенной ОС, поэтому выберем его. Например, у меня архитектура х86-64, поэтому в млоем случае это архивный пакет arm-gnu-toolchain-12.2.rel1-x86_64-aarch64-none-elf.tar.xz . Загрузим данный архив.
После загрузки сначала создадим папку, где будут располагаться все загруженные инструменты:
sudo mkdir /opt/aarch64-none-elf
Далее для распаковки архива в созданный каталог «opt/aarch64-none-elf» выполним следующую команду:
sudo tar -xvf ~/Загрузки/arm-gnu-toolchain-12.2.rel1-x86_64-aarch64-none-elf.tar.xz --strip-components=1 -C /opt/aarch64-none-elf
В данном случае предполагается, что архив загружен в папку «Загрузки» в папке текущего пользователя. После этого в папке текущего пользователя в каталоге opt/aarch64-none-elf/bin мы найдем файлы aarch64-none-elf-as и aarch64-none-elf-ld — компилятор и линкер соответственно.
Добавим в переменную PATH путь к компилятору и линкеру в папке bin . Для этого откроем выполним следующую команду:
echo 'export PATH=$PATH:/opt/aarch64-none-elf/bin' | sudo tee -a /etc/profile.d/aarch64-none-elf.sh
Чтобы изменения вступили в силу без необходимости перезагрузки, выполним команду
Проверим установку, выведя на консоль версию с помощью следующей команды:
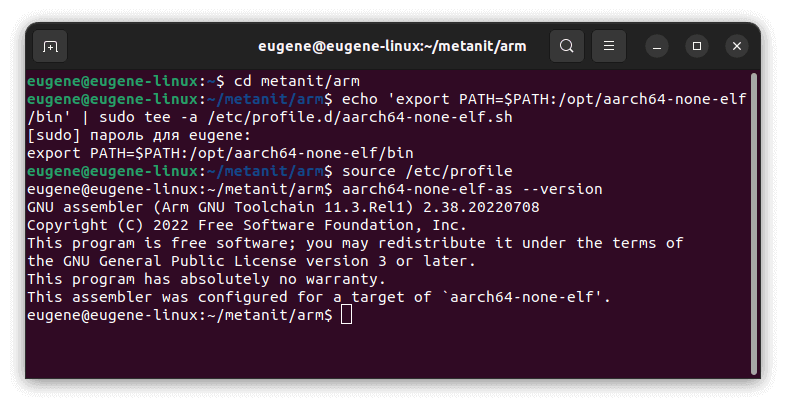
Весь остальной процесс будет аналогичен то, что был описан ранее. Так, переходим в папку с файлом с исходным кодом и для создания объектного файла выполняем команду
aarch64-none-elf-as hello.s -o hello.o
Затем нам нужно скомпновать программу с исполняемый файл с помощью линкера aarch64-none-elf-ld командой:
aarch64-none-elf-ld hello.o -o hello
Тестирование на Android
Итак, у нас есть исполняемый файл программы. Мы ее можем протестировать. Для этого нам нужен Linux на устройстве с архитектурой ARM. В качестве такого устройства я возьму самый распространенный вариант — смартфон под управлением Android. Поскольку Android построен на базе Linux и как правило устанавливается на устройства с arm архитектурой.
Для установки файла на Android нам понадобится консольная утилита adb (Android Debug Bridge), которая используется для отладки приложений под Android и которая устанавливается в рамках Android SDK. Android SDK обычно устанавливается вместе с Android Studio. Но мы также можем установить ADB отдельно. Для этого выполним команду
Теперь переместим скомпилированный файл hello на устройство под Android. Для этого прежде всего подключим к компьютеру смартфон с Android. Перейдем в консоли с помощью команды cd к папке с файлом hello и выполним следующую команду
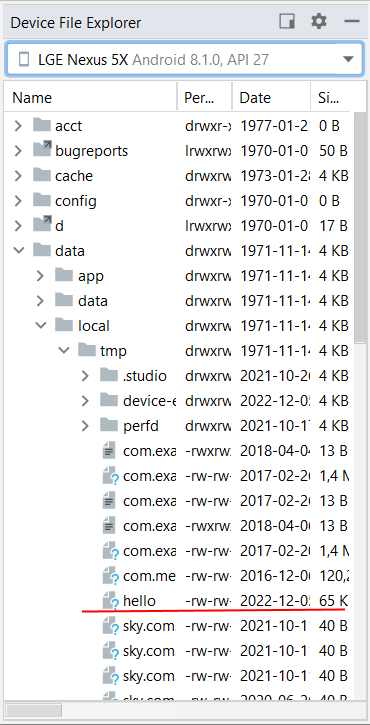
adb push hello /data/local/tmp/hello
То есть в данном случае используем команду push для помещения копии файла hello на смартфон в папку /data/local/tmp/
Далее перейдем к консоли устройства Android с помощью команды:
Далее перейдем к папке /data/local/tmp с помощью команды
Затем изменим режим файла, чтобы его можно было запустить:
и в конце выполним файл hello
И на консоль должна быть выведена строка «Hello METANIT.COM!»
How to start ARM programming in linux?
I was using PIC micro controller for my projects. Now I would like to move to ARM based Controllers. I would like to start ARM using Linux (using C). But I have no idea how to start using Linux. Which compiler is best, what all things I need to study like a lot of confusions. Can you guys help me on that? My projects usually includes UART, IIC, LCD and such things. I am not using any RTOS. Can you guys help me? Sorry for my bad English
5 Answers 5
Once you put a heavyweight OS like Linux on a device, the level of abstraction from the hardware it provides makes it largely irrelevant what the chip is. If you want to learn something about ARM specifically, using Linux is a way of avoiding exactly that!
Morover the jump from PIC to ARM + Linux is huge. Linux does not get out of bed for less that 4Mb or RAM and considerably more non-volatile storage — and that is a bare minimum. ARM chips cover a broad spectrum, with low-end parts not even capable of supporting Linux. To make Linux worthwhile you need an ARM part with MMU support, which excludes a large range of ARM7 and Cortex-M parts.
There are plenty of smaller operating systems for ARM that will allow you to perform efficient (and hard real-time) scheduling and IPC with a very small footprint. They range form simple scheduling kernels such as FreeRTOS to more complete operating systems with standard device support and networking such as eCOS. Even if you use a simple scheduler, there are plenty of libraries available to support networking, filesystems, USB etc.
The answer to your question about compiler is almost certainly GCC — thet is the compiler Linux is built with. You will need a cross-compiler to build the kernel itself, but if you do have an ARM platform with sufficient resource, once you have Linux running on it, your target can host a compiler natively.
If you truly want to use Linux on ARM against all my advice, then the lowest cost, least effort approach to doing so is perhaps to use a Raspberry Pi. It is an ARM11 based board that runs Linux out of the box, is increasingly widely supported, and can be overclocked to 900MHz