- Bluetooth Controlled Car
- This is my first Arduino-based, Bluetooth-controlled RC car. It is controlled by a smart phone application.
- Ведроид-мобиль — робот на Arduino — Часть 3. Подключаем Bluetooth
- Модернизация Motor Shield
- Bluetooth модуль JY-MCU для Arduino
- Подключение Bluetooth JY-MCU к Arduino Mega 2560
- Скетч для управления роботом на Arduino по Bluetooth через смартфон на Android
- Программа Bluetooth RC Car — управление роботом-машинкой со смартфона на Android
- Демонстрация работы
- Bluetooth rc car arduino скетч
Bluetooth Controlled Car
This is my first Arduino-based, Bluetooth-controlled RC car. It is controlled by a smart phone application.
Dual H-Bridge motor drivers L298
Maker Essentials — Micro-motors & Grippy Wheels
\t Arduino Bluetooth RC Car
Code for Arduino blootooth controlled RC Car
This is the code you will have to upload to your Arduino board.
1char t; 2 3void setup() 4pinMode(13,OUTPUT); //left motors forward 5pinMode(12,OUTPUT); //left motors reverse 6pinMode(11,OUTPUT); //right motors forward 7pinMode(10,OUTPUT); //right motors reverse 8pinMode(9,OUTPUT); //Led 9Serial.begin(9600); 10 11> 12 13void loop() 14if(Serial.available()) 15 t = Serial.read(); 16 Serial.println(t); 17> 18 19if(t == 'F') //move forward(all motors rotate in forward direction) 20 digitalWrite(13,HIGH); 21 digitalWrite(11,HIGH); 22> 23 24else if(t == 'B') //move reverse (all motors rotate in reverse direction) 25 digitalWrite(12,HIGH); 26 digitalWrite(10,HIGH); 27> 28 29else if(t == 'L') //turn right (left side motors rotate in forward direction, right side motors doesn't rotate) 30 digitalWrite(11,HIGH); 31> 32 33else if(t == 'R') //turn left (right side motors rotate in forward direction, left side motors doesn't rotate) 34 digitalWrite(13,HIGH); 35> 36 37else if(t == 'W') //turn led on or off) 38 digitalWrite(9,HIGH); 39> 40else if(t == 'w') 41 digitalWrite(9,LOW); 42> 43 44else if(t == 'S') //STOP (all motors stop) 45 digitalWrite(13,LOW); 46 digitalWrite(12,LOW); 47 digitalWrite(11,LOW); 48 digitalWrite(10,LOW); 49> 50delay(100); 51>
Ведроид-мобиль — робот на Arduino — Часть 3. Подключаем Bluetooth

В этот раз я опишу процесс подключения к моему роботу «Ведроид-мобиль» модуля Bluetooth JY-MCU и реализую управление через смартфон на Android.
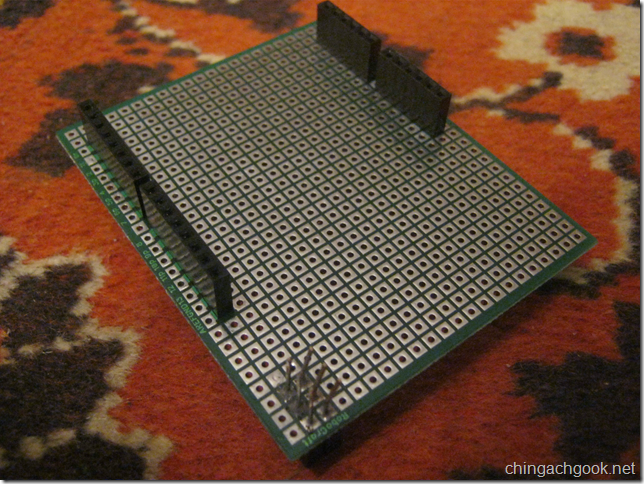
Модернизация Motor Shield
Получилось так, что производители модуля Motor Shield лишили своих покупателей возможности устанавливать поверх своего продукта другой модуль. Видимо им нравится быть сверху или просто зажали нормальную панельку контактов.
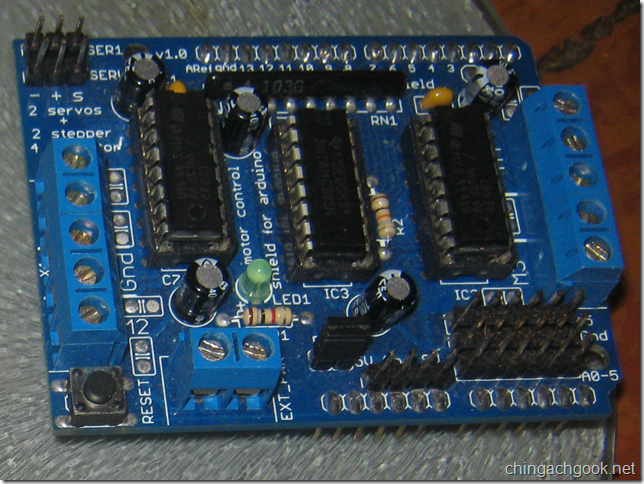
Меня этот нюанс совсем не устраивает. Именно поэтому я решил взяться за паяльник и привести Motor Shield к удобному для меня виду.
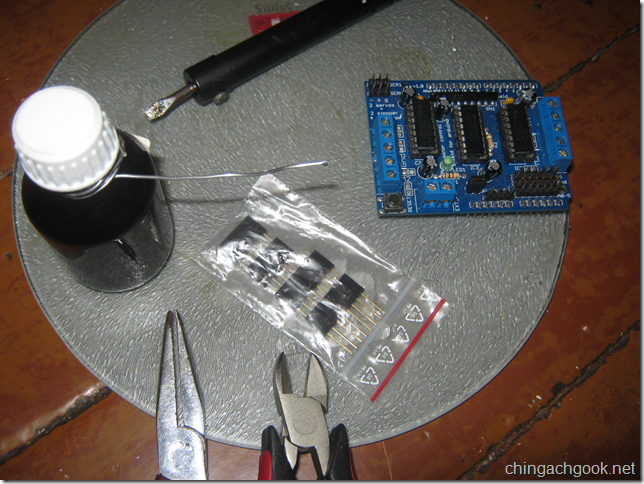
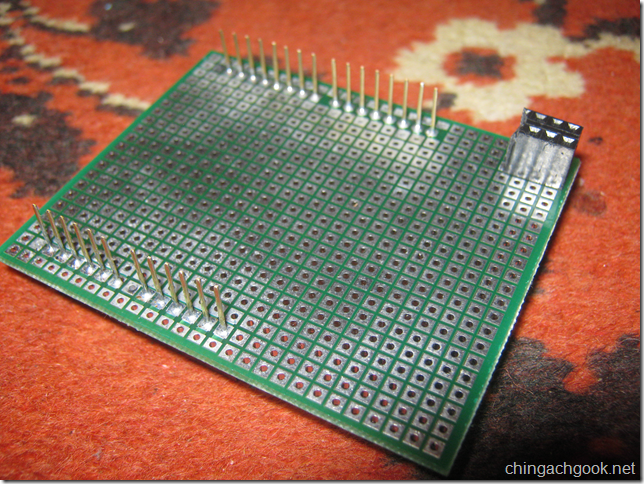
Аккуратно выдрал родные панельки контактов и выкинул их нафиг.

Установил на их место нормальные.
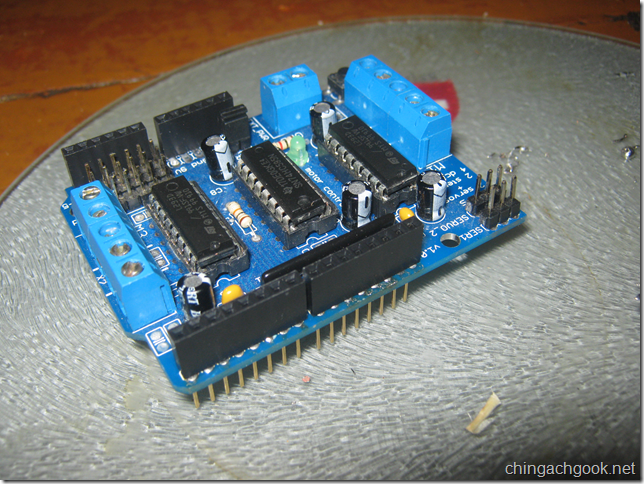
В таком виде модулем стало пользоваться гораздо удобнее. Теперь я смогу нормально подключить провода от Bluetooth в разъемы, а не припаивать их намертво к контактам на Motor Shield.
Bluetooth модуль JY-MCU для Arduino
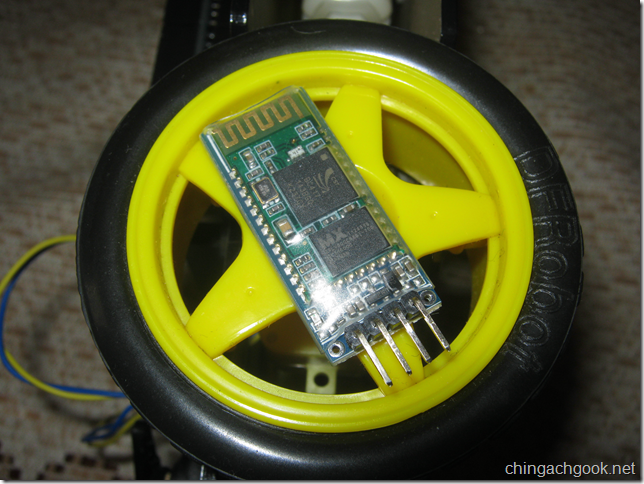
Сам Bluetooth модуль JY-MCU довольно миниатюрный. В комплект поставки входит кабель для подключения. Назначение выводов расписано на обратной стороне.
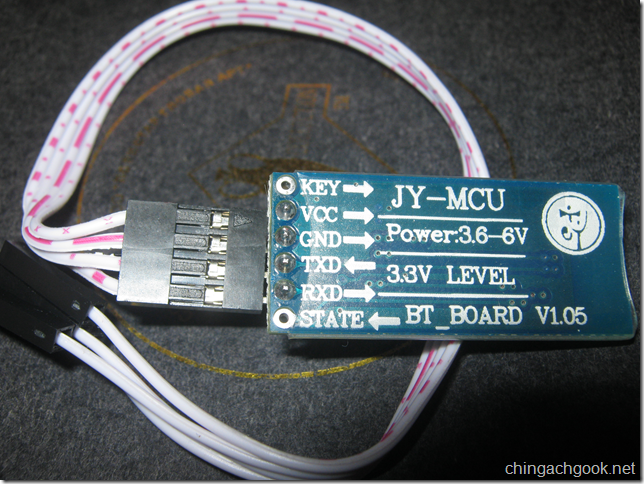
Запитать его можно от источника питания 3,6-6В. Это предоставляет нам возможность подключить его напрямую к Arduino без использования стабилизатора или делителя напряжения.
Код, используемый при подключении к устройству: 1234.
Подключение Bluetooth JY-MCU к Arduino Mega 2560
Подключение довольно простое.
Официальная схема подключения:
- VCC на JY-MCU подключаем к +5В Arduino
- GND на JY-MCU подключаем к GND Arduino
- TXT на JY-MCU подключаем к RX (0) на Arduino
- RXD на JY-MCU подключаем к TX (1) на Arduino
При таком варианте подключения придется каждый раз отключать питание модуля Bluetooth перед загрузкой скетча. Не забывайте про это.
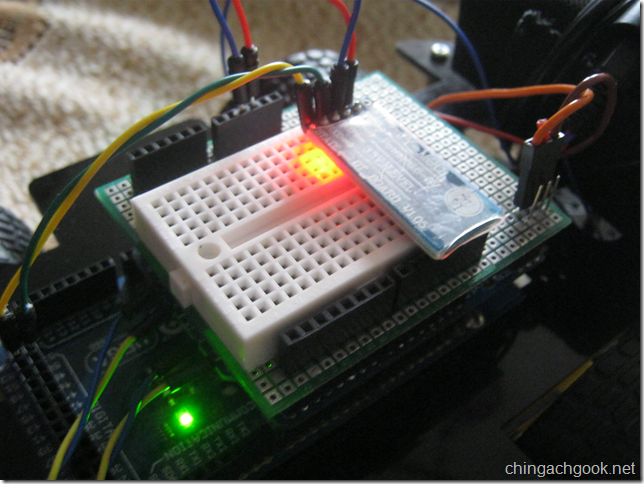
Меня такой вариант не устраивает, поэтому я решил использовать дискретные порты с поддержкой Serial.
Неофициальная схема подключения:
- VCC на JY-MCU подключаем к +5В Arduino
- GND на JY-MCU подключаем к GND Arduino
- TXT на JY-MCU подключаем к дискретному PIN 50 на Arduino
- RXD на JY-MCU подключаем к дискретному PIN 51 на Arduino
Вот теперь можно загружать скетчи без отключения питания модуля Bluetooth.
Чтобы закрепить Bluetooth, я решил использовать плату Proto Shield и миниатюрную беспаечную макетную плату. К ней в будущем и буду подключать остальное оборудование, элементы управления и индикации.
Скетч для управления роботом на Arduino по Bluetooth через смартфон на Android
В своём скетче я реализовал следующие функции:
- Движение вперед
- Движение назад
- Разворот влево
- Разворот вправо
- Плавный поворот влево при движении вперед
- Плавный поворот вправо при движении вперед
- Плавный поворот влево при движении назад
- Плавный поворот вправо при движении назад
- Остановка
В скетче использовал функции, чтобы не дублировать код при схожих событиях.
#include // Подключаем библиотеку для управления двигателями
#include // Подключаем библиотеку для сервоприводов
#include // Подключаем библиотеку для работы с Serial через дискретные порты//Создаем объекты для двигателей
AF_DCMotor motor1(1); //канал М1 на Motor Shield — задний левый
AF_DCMotor motor2(2); //канал М2 на Motor Shield — задний правый
AF_DCMotor motor3(3); //канал М3 на Motor Shield — передний левый
AF_DCMotor motor4(4); //канал М4 на Motor Shield — передний правый// Создаем объект для сервопривода
Servo vservo;SoftwareSerial BTSerial(50, 51); // RX, TX
// Создаем переменную для команд Bluetooth
char vcmd;
// Создаем переменные для запоминания скорости двигателей
int vspdL, vspdR;
/* Создаем переменную, на значение которой будет уменьшаться скорость при плавных поворотах.
Текущая скорость должна быть больше этого значения. В противном случае двигатели со стороны направления поворота просто не будут вращаться */
int vspd = 200;void setup() // Устанавливаем скорость передачи данных по Bluetooth
BTSerial.begin(9600);
// Устанавливаем скорость передачи данных по кабелю
Serial.begin(9600);
// Выбираем пин к которому подключен сервопривод
vservo.attach(9); // или 10, если воткнули в крайний разъём
// Поворачиваем сервопривод в положение 90 градусов при каждом включении
vservo.write(90);
// Устанавливаем максимальную скорость вращения двигателей
vspeed(255,255);
>void loop() // Если есть данные
if (BTSerial.available())
// Читаем команды и заносим их в переменную. char преобразует код символа команды в символ
vcmd = (char)BTSerial.read();
// Отправляем команду в порт, чтобы можно было их проверить в «Мониторе порта»
Serial.println(vcmd);// Вперед
if (vcmd == ‘F’) vforward();
>
// Назад
if (vcmd == ‘B’)
vbackward();
>
// Влево
if (vcmd == ‘L’)
vleft();
>
// Вправо
if (vcmd == ‘R’)
vright();
>
// Прямо и влево
if (vcmd == ‘G’)
vforwardleft();
>
// Прямо и вправо
if (vcmd == ‘I’)
vforwardright();
>
// Назад и влево
if (vcmd == ‘H’)
vbackwardleft();
>
// Назад и вправо
if (vcmd == ‘J’)
vbackwardright();
>
// Стоп
if (vcmd == ‘S’)
vrelease();
>
// Скорость 0%
if (vcmd == ‘0’)
vspeed(0,0);
>
// Скорость 10%
if (vcmd == ‘1’)
vspeed(25,25);
>
// Скорость 20%
if (vcmd == ‘2’)
vspeed(50,50);
>
// Скорость 30%
if (vcmd == ‘3’)
vspeed(75,75);
>
// Скорость 40%
if (vcmd == ‘4’)
vspeed(100,100);
>
// Скорость 50%
if (vcmd == ‘5’)
vspeed(125,125);
>
// Скорость 60%
if (vcmd == ‘6’)
vspeed(150,150);
>
// Скорость 70%
if (vcmd == ‘7’)
vspeed(175,175);
>
// Скорость 80%
if (vcmd == ‘8’)
vspeed(200,200);
>
// Скорость 90%
if (vcmd == ‘9’)
vspeed(225,225);
>
// Скорость 100%
if (vcmd == ‘q’)
vspeed(255,255);
>
>
>// Вперед
void vforward() vspeed(vspdL,vspdR);
vforwardRL();
>// Вперед для RL
void vforwardRL() motor1.run(FORWARD);
motor2.run(FORWARD);
motor3.run(FORWARD);
motor4.run(FORWARD);
>// Назад
void vbackward() vspeed(vspdL,vspdR);
vbackwardRL();
>// Назад для RL
void vbackwardRL() motor1.run(BACKWARD);
motor2.run(BACKWARD);
motor3.run(BACKWARD);
motor4.run(BACKWARD);
>// Влево
void vleft() vspeed(vspdL,vspdR);
motor1.run(BACKWARD);
motor2.run(FORWARD);
motor3.run(BACKWARD);
motor4.run(FORWARD);
>// Вправо
void vright() vspeed(vspdL,vspdR);
motor1.run(FORWARD);
motor2.run(BACKWARD);
motor3.run(FORWARD);
motor4.run(BACKWARD);
>// Вперед и влево
void vforwardleft() if (vspdL > vspd) vspeed(vspdL-vspd,vspdR);
>
else
vspeed(0,vspdR);
>
vforwardRL();
>// Вперед и вправо
void vforwardright() if (vspdR > vspd) vspeed(vspdL,vspdR-vspd);
>
else
vspeed(vspdL,0);
>
vforwardRL();
>// Назад и влево
void vbackwardleft() if (vspdL > vspd) vspeed(vspdL-vspd,vspdR);
>
else
vspeed(0,vspdR);
>
vbackwardRL();
>// Назад и вправо
void vbackwardright() if (vspdR > vspd) vspeed(vspdL,vspdR-vspd);
>
else
vspeed(vspdL,0);
>
vbackwardRL();
>// Стоп
void vrelease() motor1.run(RELEASE);
motor2.run(RELEASE);
motor3.run(RELEASE);
motor4.run(RELEASE);
>// Изменение скорости
void vspeed(int spdL,int spdR) if (spdL == spdR) vspdL=spdL;
vspdR=spdR;
>
motor1.setSpeed(spdL);
motor2.setSpeed(spdR);
motor3.setSpeed(spdL);
motor4.setSpeed(spdR);
>
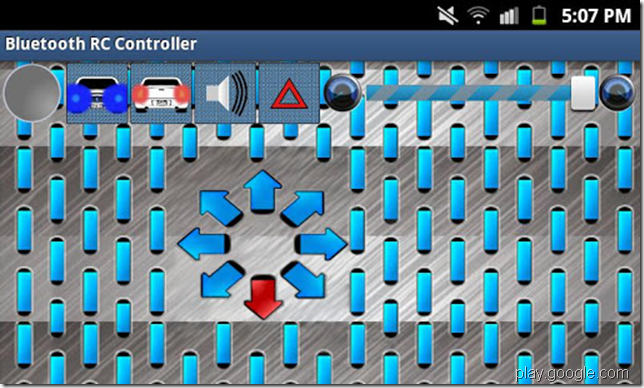
Программа Bluetooth RC Car — управление роботом-машинкой со смартфона на Android
В свой смартфон я установил программу Bluetooth RC Car. На мой взгляд — это лучшая софтинка для управления роботом-машинкой.
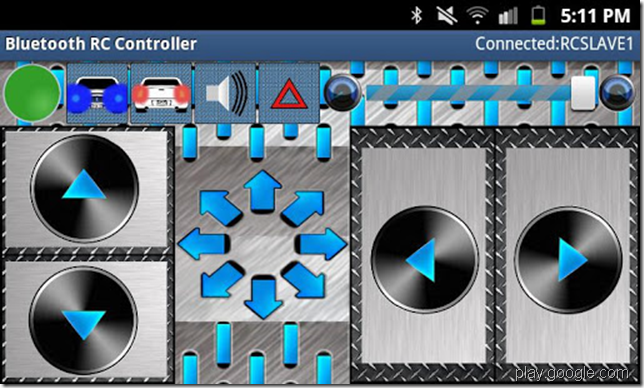
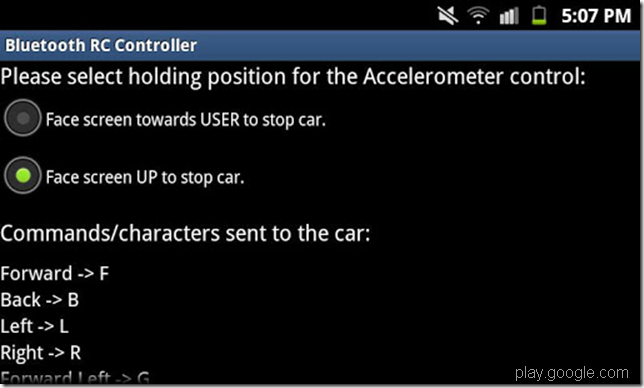
Программа позволяет передавать команды при нажатии на кнопки или реагировать на данные с акселерометра в смартфоне, регулировать скорость движения ползунком, включать передние и задние фонари, включать и выключать звуковой сигнал, включать и выключать сигнал “аварийка”.
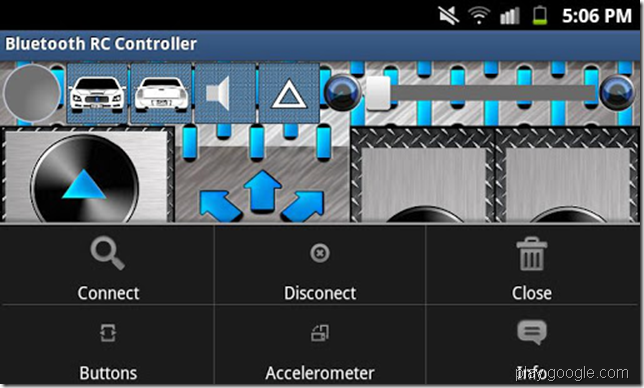
Для работы программы требуется Android версии 2.3.3 или выше. Размер программы 3 мегабайта.
- F – вперед
- B – назад
- L – влево
- R – вправо
- G – прямо и влево
- I – прямо и вправо
- H – назад и влево
- J – назад и вправо
- S – стоп
- W – передняя фара включена
- w – передняя фара выключена
- U – задняя фара включена
- u – задняя фара выключена
- V – звуковой сигнал включен
- v – звуковой сигнал выключен
- X – сигнал “аварийка” включен
- x — сигнал “аварийка” выключен
- 0 – скорость движения 0%
- 1 – скорость движения 10%
- 2 – скорость движения 20%
- 3 – скорость движения 30%
- 4 – скорость движения 40%
- 5 – скорость движения 50%
- 6 – скорость движения 60%
- 7 – скорость движения 70%
- 8 – скорость движения 80%
- 9 – скорость движения 90%
- q – скорость движения 100%
Как вы видите, полигон для творчества вполне неплохой. Я бы еще добавил возможность раздельного включения правых и левых фонарей для передних и задних фар.
Жирным я выделил команды, поддержка которых уже реализована в скетче. Остальные я собираюсь использовать по другому назначению.
Принцип передачи команд: при нажатии на кнопку в программе, команда передается по Bluetooth один раз, а при отпускании кнопки сразу передается команда S-остановка.
Демонстрация работы

В следующий раз я планирую подключить к роботу ультразвуковой дальномер и реализовать алгоритм объезда препятствий.
- Автор: source
- Миниатюра:
- Рубрика: Arduino от А до ЯAndroid, Arduino, Arduino Mega 2560, Bluetooth, Bluetooth RC Car, JY-MCU, Motor Shield, Ведроид-мобиль, робот, смартфон —>
- Опубликовано: 27.06.2023
- Обновлено: 27.06.2023
- Комментариев: 73
- Просмотров: 43 415
Дата Бот
Bluetooth rc car arduino скетч


Rather than buying something, make it.
Browse thousands of projects created by the Arduino community
792244 views • 605 comments • 415 respects

Arduino Based Mini CNC 2D Plotter
163842 views • 40 comments • 214 respects
211550 views • 90 comments • 57 respects

Ultrasonic Security System
162122 views • 140 comments • 188 respects
Measure Heart Rate and SpO2 with MAX30102
321145 views • 154 comments • 244 respects
156511 views • 63 comments • 60 respects

Share and Compete in Project of the Month!
Unlock amazing rewards by submitting your project today.










Create projects fast, with no coding
Import, use and customize ready-made templates for your IoT projects
Dream big, we will take care of the rest
See what you can create with Arduino Cloud
White Mountains Regional High School
Discover how this school is working with remote sensing applications that allow them to do things like automate lighting, regulate temperature, adjust humidity, and check on the greenhouse from their phones.

Smart ovens take a leap into the future
How a strong partnership and the Arduino Portenta Machine Control led historical company Rinaldi Superforni to revolutionize their business


The new Portenta X8 and Max Carrier
Industrial Arduino and Linux combined to get the best of both worlds