- What Cars Have Bluetooth Capabilities?
- Why It’s Needed
- Cost and History
- Cars with and without Bluetooth
- At the Dealership
- Future
- Роботизированная машина. Часть III: Bluetooth
- Сегодня Bluetooth в автомобильной аудиосистеме — обычное дело. Но когда эта технология вообще впервые появилась в автомобилях? Об этом любителям автозвука рассказали специалисты JVC Russia.
What Cars Have Bluetooth Capabilities?

Bluetooth is defined as any two wireless devices that can communicate together such as phones, PDAs, desktop and laptop computers. The most common usage of the term, however, is in modern day automobiles. Cars as of yet don’t offer wireless laptop connectivity, but many do offer wireless cell phone connections, often times with voice activation.
Why It’s Needed

The predominant need for Bluetooth technology came in cars with the rise in cell phone usage. Statistics showed that rising insurance and accident rates were due to people being distracted by their cell phones while driving. This inspired many states to pass laws that banned cell phone use in cars. In some instances, Bluetooth connectivity or using a wireless headpiece became the only legal way to receive or make a call while driving on the road.
Cost and History

Most older non-luxury models did not come standard with Bluetooth and even then not all of them came with it as standard. Drivers of cars without Bluetooth can still use their cell phone in the car, however, if they purchase a Bluetooth-enabled headset (most of which run from $50 to several hundred dollars). Also, the only way to use Bluetooth in your car with a built-in system or a headset is with a Bluetooth-equipped phone.
Cars with and without Bluetooth

Many cars, like the $13,000 Kia Soul, come with standard Bluetooth. In the techno-savvy 2010 Toyota Prius, however, it is an option you have to pay for. This disparity in technological implementation has caused much confusion among consumers, many of whom assume their new car comes with it standard. The best way to ensure your car is equipped with Bluetooth is to either check the manufacturer’s website for a list of standard features or check your owner’s manual.
At the Dealership

Many people are shocked when they find out that most Hyundai/Kia and Ford products have Bluetooth as standard while some BMW and Toyota models leave out this important safety feature. Either that or they charge extra to add Bluetooth to the list of optional extras. The most common place to find Bluetooth not as standard is in supercars from manufacturers like Porsche, Ferrari, Lamborghini and until recently Maserati (which now equips its cars with it as standard).
Future
For the 2010 model year many cars that did not previously have Bluetooth as even an option are introducing the technology. While you should always check with the manufacturer first as its standard feature lists is prone to change without notice, here is a short list of 2010 models with newly standard Bluetooth. In no particular order they are the 2010 Volvo S40, Toyota Venza, Toyota Land Cruiser, VW Golf, Jetta and GTI and all 2010 Audi models. All told it is predicted that for the 2010 model year 38 percent of all vehicles sold will have Bluetooth.
Роботизированная машина. Часть III: Bluetooth
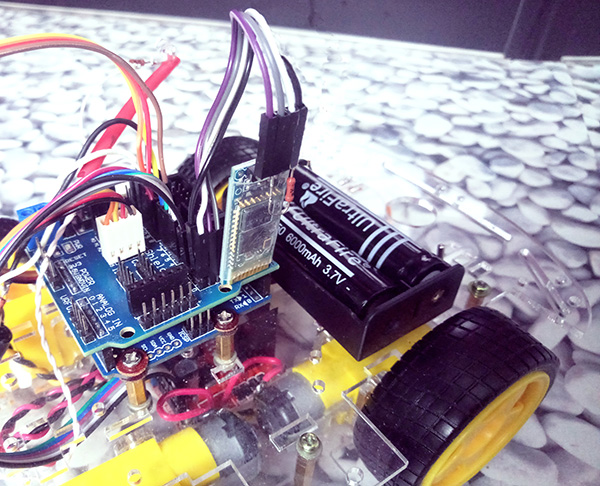
Это третья статья, посвящённая модификации роботизированной машины. Раньше машинка умела передвигаться только самостоятельно, избегая соударения с препятствиями. Теперь пришло время добавить режим ручного управления. В качестве пульта управления будет выступать телефон под управлением Android, а передача команд будет выполняться по протоколу Bluetooth.
Используется аппаратный UART микроконтроллера для связи с модулем BT.
Данная статья интересна именно с точки зрения программирования и управления по Bluetooth. Вопросы по сборке подробно освещены в предыдущей статье.
Первое, что необходимо сделать, это дополнить робота модулем HC-06 для общения по Bluetooth. Предварительно потребуется выполнить настройку HC-06. Можно использовать модуль HC-05, но он дороже, а его функционал окажется избыточным для данной задачи.
Следующий шаг — установить на телефон бесплатную программу Bluetooth RC Controller. Программа имитирует основные органы управления пульта и отправляет команды по Bluetooth в текстовом виде.
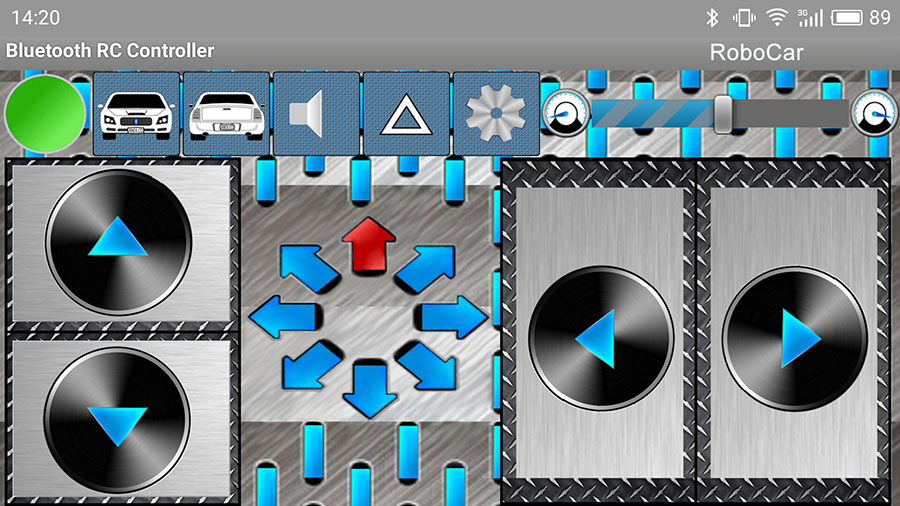
Как видно, интерфейс программы интуитино понятен. Левый верхний угол — это индикатор соединения с модулем HC-06 (зелёный говорит о том, что соединение установлено). По центру располагается «компас», который показывает выбранное направление движения, а по переферии располагаются органы управления. Было рашено задействовать абсолютно все для нашего автомобиля. Перечисляем слева направло.
- Передние фары — у нас как раз уже есть голубой светодиод, который и назвался фарой!
- Задние фонари — у нас для этого использовался встроенный светодиод
- Гудок — зуммер тоже имеется!
- Аварийка — у нас это будет составной светодиод, который сигнализировал о «панике»
- Кнопка с шестерёнкой — это вызов меню настройки самого пульта
- Бегунок изменения скоростей — о, вот тут пришлось слегка напрячься, чтобы дополнить код автомобиля
- Ну а ниже кнопки Вперёд / Назад / Влево / Вправо — можно удерживать одновременно две.
В итоге, почти все кнопки пульта сразу получили прямое соответствие имеющимся командам в машинке. Но вот кусок кода регулировки скоростей пришлось дописывать и отлаживать отдельно. Ещё нетривиально получилось с диагональными направлениями. Они реализованы через разницу скоростей на левом и правом борту.
Программа для прошивки приведена ниже. Опрос сонара в моём варианте отключен, но его можно вернуть. Удивительно, но вариант с остановкой вблизи препятствия мне показался невыносимым при ручном управлении.
// 4WD RoboCar // Sonar + Bluetooth // 2018-January-20 // v.11a (bluetooth) // (c) 2018, Vladimir E. DRACH // Global variables: int Critical = 14; // Критическое расстояние до препятствия в [см] int BT_Step = 10; // Время движения при получении одного СИМВОЛА по BT [мс] byte randomNumber; // Случайное число byte Cost = 60; // Штраф (назначается за неспособность ехать вперёд) byte Profit = 180; // Очки, т.е. "прибыль", которая плавно растёт при движении вперёд byte velocity = 220; // Скорость моторов [1..255] // Подобрать экспериментально: const byte SPEED_MIN = 100; // минимальная скорость моторов, если меньше - моторы не смогут вращаться const byte SPEED_MAX = 250; // максимальная скорость моторов // для управления по Bluetooth char btCommand = 'S'; // счетчики для определения потери связи с Bluetooth unsigned long btTimer0 = 2000; //Stores the time (in millis since execution started) unsigned long btTimer1 = 0; //Stores the time when the last command was received from the phone // Описываем подключение драйвера двигателей // A - правый борт // В - левый борт int enableB = 3; //~ int pinB2 = 4; // int pinB1 = 5; // int enableA = 6; //~ int pinA1 = 7; //~ int pinA2 = 8; // #define illumination A0 // подключаем составной светодиод // Подключаем ультразвуковой датчик #define trigPin 9 #define echoPin 10 #define light 11 // На этот вывод подключены фары int Buzzer = 12;// Подключаем зуммер 12 (!) // Фоторезистор подключен к АЦП #define PHOTO_SENSOR A5 #define Sweep 8000 // скорость нарастания и убывания частоты #define Woo_wait_sec 2 // сколько с. длится гудение на макс. частоте void setup() < // Определяем направление работы линий pinMode (enableA, OUTPUT); pinMode (pinA1, OUTPUT); pinMode (pinA2, OUTPUT); pinMode (enableB, OUTPUT); pinMode (pinB1, OUTPUT); pinMode (pinB2, OUTPUT); pinMode (13 , OUTPUT); pinMode (light , OUTPUT); pinMode (trigPin, OUTPUT); pinMode (echoPin, INPUT) ; pinMode (illumination, OUTPUT); enableMotors(); SayBeep(); delay(2000); bii(); digitalWrite(13, LOW); // Выключаем встроенный диод Serial.begin(9600); // Инициализация последовательного порта >// Описываем варианты работы моторов void motorAforward() < digitalWrite (pinA1, HIGH); digitalWrite (pinA2, LOW); >void motorBforward() < digitalWrite (pinB1, LOW); digitalWrite (pinB2, HIGH); >void motorAbackward() < digitalWrite (pinA1, LOW); digitalWrite (pinA2, HIGH); >void motorBbackward() < digitalWrite (pinB1, HIGH); digitalWrite (pinB2, LOW); >void motorAstop() < digitalWrite (pinA1, HIGH); digitalWrite (pinA2, HIGH); >void motorBstop() < digitalWrite (pinB1, HIGH); digitalWrite (pinB2, HIGH); >void motorAon() < digitalWrite (enableA, HIGH); >void motorBon() < digitalWrite (enableB, HIGH); >void motorAoff() < digitalWrite (enableA, LOW); >void motorBoff() < digitalWrite (enableB, LOW); >// Описываем варианты движения машины void goForward (int duration) < motorAforward(); motorBforward(); delay (duration); >void goBackward (int duration) < motorAbackward(); motorBbackward(); delay (duration); >void rotateRight (int duration) < motorAbackward(); motorBforward(); delay (duration); >void rotateLeft (int duration) < motorAforward(); motorBbackward(); delay (duration); >void FullStop (int duration) < motorAstop(); motorBstop(); delay (duration); >void disableMotors() < motorAoff(); motorBoff(); >void enableMotors() < motorAon(); motorBon(); // SetVelocity(SPEED_MAX, SPEED_MAX); не очень работает :( >void SetVelocity(int A, int B) < analogWrite (enableA, A); analogWrite (enableB, B); >void CheckLight () < int val = analogRead(PHOTO_SENSOR); if (val < 500) < // Темновато, включаем фары digitalWrite(light, HIGH); >else < // Светло, выключаем фары digitalWrite(light, LOW); >> // Пользуемся УЗ датчиком расстояния int distance() < int duration, distance; digitalWrite(trigPin, HIGH); delayMicroseconds(1000); digitalWrite(trigPin, LOW); duration = pulseIn(echoPin, HIGH); distance = (duration/2) / 29.1; // Переводим в сантиметры return distance; >// Функция запуска автомобиля void launch() < int distance_measured; distance_measured = distance(); // Serial.print(distance_0); // Serial.println(" сантиметров. "); SetVelocity (velocity, velocity); // Движемся вперёд, пока расстояние до преграды >критического [cm] while (distance_measured > Critical) < CheckLight (); // проверяем, не пора ли зажигать фары? goForward(30); // Едем вперёд некоторое время randomNumber = random(1,100); // передёрнули затвор генератора ПСЧ if (Profit < 254 ) < Profit++; >; // Serial.print(Profit); // Serial.println(" очков. "); distance_measured = distance(); > FullStop(100); // Останов, т.к. впереди помеха > void Woo(int freq, long duration) < // первый параметр частота, чем ниже он тем выше частота, второй длительность long time = duration/2/freq; for(long t = 0; t < time; t++) < digitalWrite(Buzzer, HIGH); delayMicroseconds(freq); digitalWrite(Buzzer, LOW); delayMicroseconds(freq); >> void Syren() < for(int i = 0; i = 100; f=f-40) < // нарастание частоты Woo(f, Sweep); >// Woo(400, Woo_wait_sec*100); // сколько длится гудение на максимальной частоте for(int f = 100; f > > void panic() < int distance_tmp; int distance_new = 32000; int angle = 600; // угол поворота, измеряем в [мс] FullStop(100); // Сначала останавливаемся Profit = 255; // Забываем про старые штрафы! // Serial.print(Profit); // Serial.println(" очков. "); digitalWrite(illumination, HIGH); // включаем мигалку Syren (); Syren (); Syren (); delay(1000); // пауза, для отдыха // Выполняем манёвры на высокой скорости (ведь паника!) analogWrite (enableA, velocity); analogWrite (enableB, velocity); // 0) Начинаем крутиться волчком в какую-то сторону: randomNumber = random(1,100); if (randomNumber < 50) < motorAbackward(); motorBforward(); >else < motorBbackward(); motorAforward(); >; // Истерично продолжаем крутиться, пока гудит сирена: Syren (); delay (1000); // Ждём FullStop(1000); delay (100); // Ждём // 1) Ищем хоть какое-то направление, куда вообще можно ехать distance_tmp = distance(); do < rotateRight(angle); // Крутимся FullStop(1000); // Ждём и смотрим вдаль distance_tmp = distance(); >while(distance_tmp < Critical); // повторяем поворот, если расстояние всё ещё мало SayBeep(); // rotateLeft(angle); // Возвращаемся на один шаг // 2) Пытаемся выбрать лучшее направление! do < distance_tmp = distance(); rotateRight(angle); // Крутимся и проверяем дистанцию FullStop(900); // Ждём и смотрим вдаль distance_new = distance(); delay (800); // Ждём и смотрим вдаль >while( distance_new > distance_tmp ); // Не угадали, раньше было лучше, rotateLeft(angle); // поэтому поворачиваемся обратно FullStop(1000); // Восстанавливаем дыхание, успокаиваемся digitalWrite(illumination, LOW); // успокоились, выключаем мигалку delay (410); // Ждём SayBeep(); > void rollBack() < digitalWrite(13, HIGH); // Включаем встроенный диод! // Сначала откатываемся назад на случайное количество шагов randomNumber = random(700,2100); //analogWrite (enableA, 150); //analogWrite (enableB, 189); goBackward(randomNumber); FullStop(200); // Восстанавливаем дыхание, успокаиваемся // Случайным образом выбираем направление поворота: randomNumber = random(1,100); do < // поворачиваемся в выбранную сторону на случайный угол if (randomNumber < 50) < rotateRight(random(450,1300)); >else < rotateLeft(random(350,1400)); >; FullStop(1000); // Выключаем моторы tone(Buzzer, 600, 333); delay (700); // передышка! > while( distance() < Critical ); // повторяем поворот, если расстояние всё ещё мало analogWrite (enableA, velocity); analogWrite (enableB, velocity); FullStop(600); // Восстанавливаем дыхание, успокаиваемся digitalWrite(13, LOW); // Выключаем встроенный диод // SayBeep(); delay (200); // передышка! >void avoid() < CheckLight (); // проверяем, не пора ли зажигать фары? tone(Buzzer, 2100, 110); delay (700); // передышка! // Штрафуем сами себя: if (Profit >Cost) < Profit = Profit - Cost; // Ещё есть возможность оплатить штраф, rollBack(); // тогда откат назад с разворотом // Serial.print(Profit); // Serial.println(" очков. "); >else < // Нельзя штрафовать, всё плохо, значит запутались - паникуем panic(); >> void SayBeep() < tone(Buzzer, 700, 109); delay(200); tone(Buzzer, 1200, 109); delay(200); tone(Buzzer, 2600, 240); delay(350); noTone(Buzzer); >void boo() < tone(Buzzer, 600, 200); delay (300); tone(Buzzer, 410, 600); delay (600); >void bii() < tone(Buzzer, 1611, 90); delay (150); tone(Buzzer, 1611, 90); delay (150); tone(Buzzer, 2111, 400); delay (440); >void SafeForward (int duration) < int distance_measured; distance_measured = distance(); if ( distance_measured >Critical ) else < FullStop(10); boo(); >> void BluetoothControl() < for(int i = 0; i do < // CheckLight (); // проверяем, не пора ли зажигать фары? aquire(); >while ( 1==1 ); > void SelfControl() < do< randomNumber = random(2,5); // вхолостую выбираем псевдо-случайное число launch(); // запускаем автомобиль вперёд до встречи с преградой avoid(); // откатываемся от препятствия и как-то поворачиваемся CheckLight (); // проверяем, не пора ли зажигать фары? >while ( 1==1 ); > void aquire () < if (Serial.available() >0) < btTimer1 = millis(); btCommand = Serial.read(); switch (btCommand)< case 'F': goForward(BT_Step); // Можно просто ехать вперёд наобум, // SafeForward (BT_Step); // а можно включить сонар break; case 'B': goBackward(BT_Step); break; case 'L': rotateLeft(BT_Step); break; case 'R': rotateRight(BT_Step); break; case 'S': FullStop(BT_Step); break; case 'G': // Вперёд, подкручивая вправо if (velocity < SPEED_MAX-99) < SetVelocity((velocity+99), (velocity-99));>else // выставили дифференциал goForward (BT_Step); SetVelocity(velocity, velocity); // вернули скорость break; case 'I': // Вперёд, подкручивая влево if (velocity < SPEED_MAX-99) < SetVelocity((velocity-99), (velocity+99));>else // выставили дифференциал goForward (BT_Step); SetVelocity(velocity, velocity); // вернули скорость break; /*case 'J': //BR if (velocity < SPEED_MAX-80) < SetVelocity((velocity-80), (velocity+80));>else // выставили дифференциал goBackward(BT_Step); SetVelocity(velocity, velocity); // вернули скорость break; case 'H': //BL if (velocity < SPEED_MAX-80) < SetVelocity((velocity+80), (velocity-80));>else // выставили дифференциал goBackward(BT_Step); SetVelocity(velocity, velocity); // вернули скорость break; */ case 'W': // Зажгли фары digitalWrite(light, HIGH); break; case 'w': // Погасили фары digitalWrite(light, LOW); break; case 'D': // Everything OFF FullStop(100); break; case 'X': // аварийка digitalWrite(illumination, HIGH); break; case 'x': // аварийка digitalWrite(illumination, LOW); break; case 'U': // Back ON digitalWrite(13, HIGH); // Включаем встроенный диод break; case 'u': // Back OFF digitalWrite(13, LOW); // Выключаем встроенный диод break; case 'V': // Пискнуть весело (в оригинале - гудок ВКЛ) bii(); break; case 'v': // Пискнуть грустно (в оригинале (гудок ВЫКЛ) boo(); break; default: // Get SPEED_CURRENT if ( btCommand == 'q' ) < velocity = SPEED_MAX; SetVelocity(velocity, velocity); >else < // Символы '0' - '9' эквивалентны кодам integer 48 - 57 соответственно if ( (btCommand >= 48) && (btCommand > // else > // switch > // if (Serial.available() > 0) else < btTimer0 = millis(); // Узнаём текущее время (millis since execution started) //Check if it has been 500ms since we received last btCommand. if ((btTimer0 - btTimer1) >800) < //More than 800 ms have passed since last btCommand received, car is out of range. FullStop(1000); digitalWrite(illumination, HIGH); // включаем мигалку boo (); FullStop(4000); Syren(); FullStop(8000); >> > void loop() < CheckLight (); // проверяем, не пора ли зажигать фары? // Serial.println("System ready. "); if ( distance() >Critical ) < // Путь вперёд свободен, SelfControl(); // робот отправляется в самостоятельное путешествие >else < BluetoothControl(); // Впереди преграда, отдаём управление водителю >> Выбор режима (ручное управление или демо) выполняется в самом начале за счёт проверки расстояния до преграды. При включении машина смотрит в стену — ручное управление по Bluetooth. При включении нет преград перед машиной — самостоятельное движение (демо-режим).
Сегодня Bluetooth в автомобильной аудиосистеме — обычное дело. Но когда эта технология вообще впервые появилась в автомобилях? Об этом любителям автозвука рассказали специалисты JVC Russia.

2002 год. Audi стала первым автопроизводителем, который штатно использовал Bluetooth в своём автомобиле (Audi A8).
2003 год. Daimler-Chrysler и Acura представили аудиосистемы с интегрированным модулем Bluetooth в качестве стандартной функции. В Acura TL третьего поколения технология получила название Hands-Free Link (HFL). Позже и BMW добавила его в качестве опции на своих автомобилях серий 1, 3, 5, 7 и в X5.
2004 год. Появление штатного Bluetooth в Toyota Prius и Lexus LS 430.
2007 год. Всё больше производителей дополняют штатные системы модулем Bluetooth: Toyota Camry, Infiniti G35, несколько моделей Nissan и Volvo…
Дальше — только по нарастающей. Сегодня Bluetooth доступен в автомобиле практически каждому. Например, даже недорогие головные устройства JVC сегодня поддерживают режим hands-free и передачу потокового аудио со смартфона на аудиосистему.
Другие автоновости Ростова и мира — на нашем сайте и в соцсетях!