- Установка
- Установка пакетов
- Добавление репозитория пакетов ROS
- Добавление ключей
- Обновление списка пакетов
- Установка пакетов ROS
- Установка дополнительных пакетов
- Настройка после установки
- Установка rosdep
- Настройка рабочего окружения
- Установка дополнительных пакетов для разработчиков
- Создание рабочего пространства
- Первый запуск
- Как установить ROS Noetic на Linux Mint 20
- Установка ROS Noetic на Linux Mint 20:
- Шаг 1: Добавление официального репозитория ROS Noetic в систему:
- Шаг 2: Добавление официального брелока ROS Noetic в систему:
- Шаг 3: Обновление системы Linux Mint 20:
- Шаг 4: Установка ROS Noetic в систему:
- Удаление ROS Noetic из Linux Mint 20:
- Вывод:
- Рекомендуемый контент
- Privacy Overview
- Install ROS Noetic on Linux Mint 20 — A step by step guide ?
- Steps to Install ROS Noetic on Linux Mint 20
- How to Uninstall ROS Noetic from Linux Mint 20 ?
- [Need assistance in fixing Linux system errors ? We can help you . ]
- Conclusion
Установка
Поскольку ROS — это мета-операционная система, вам необходимо выбрать ОС для использования. ROS поддерживает Debian, Ubuntu, Linux Mint, OS X, Fedora, Gentoo, openSUSE, Arch Linux и Windows (через виртуализацию Linux), но самыми популярными операционными системами являются Debian, Ubuntu и Linux Mint. В нашем учебнике мы будем использовать ОС Ubuntu. Для слабых компьютеров, рекомендуем использовать ОС Lubuntu (совместима с Ubuntu)
На сегодняшний день, актуальным дистрибутивом ROS является ROS Noetic Ninjemys http://wiki.ros.org/noetic этот дистрибутив мы и установим.
Оригинальная инструкция по установке ROS находится на сайте ROS https://www.ros.org/install/. За основу дальнейшей инструкции будет взята страница http://wiki.ros.org/melodic/Installation/Ubuntu.
Для установки ROS на Ubuntu существуют готовые пакеты, нам достаточно добавить репозиторий, содержащий пакеты ROS и установить их обычным для Linux способом.
Если на вашей платформе не существует подготовленных пакетов, то прийдется «собирать» все пакеты из исходного кода, что не сложно, но займет куда более продолжительное время.
Установка пакетов
Добавление репозитория пакетов ROS
Открываем окно терминала (программа terminal) (возможно Ctrl-Alt-T)
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' Добавление ключей
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 Обратите внимание, что ключ может измениться, поэтому уточните его на официальной Wiki странице http://wiki.ros.org/melodic/Installation/Ubuntu.
Обновление списка пакетов
Когда мы добавили и настроили репозиторий с пакетами ROS, мы должны обновить список пакетов доступных системе для установки. Также рекомендуется обновить все установленные пакеты Ubuntu до установки ROS.
sudo apt-get update && sudo apt-get upgrade -y Установка пакетов ROS
На этапе знакомства с ROS, проще всего установить самую полную версию системы. Данный пакет автоматический установит все основные пакеты ROS, rqt, rviz, библиотеки 2D/3D симуляции, навигации и тп.
sudo apt install ros-noetic-desktop-full Установка дополнительных пакетов
Если необходимо установить дополнительный пакет, то это можно сделать обычной утилитой установщиком apt-get . Например добавить пакет slam-gmapping можно командой.
sudo apt install ros-noetic-slam-gmapping Поиск пакетов выполняется командой
Настройка после установки
Установка rosdep
Прежде чем использовать ROS, вам необходимо инициализировать rosdep . rosdep позволяет устанавливать системные зависимости для исходных кодов, который вы хотите скомпилировать и требуется для запуска некоторых основных компонентов в ROS.
sudo rosdep init rosdep update Настройка рабочего окружения
Настройка рабочих параметров ROS, происходит через установку переменных окружения (например пути библиотек, адреса серверов и тд). Эту операцию можно делать руками, но проще настроить их автоматический экспорт при запуске интерактивной оболочки bash.
Добавим переменные окружения ROS, для их автоматической установки при запуске bash:
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc source ~/.bashrc Если вы просто хотите загрузить переменные ROS в текущем сеансе, то вы можете ввести:
source /opt/ros/melodic/setup.bash Если вы используете zsh вместо bash, то необходимо выполнить команду.
echo "source /opt/ros/noetic/setup.zsh" >> ~/.zshrc source ~/.zshrc Установка дополнительных пакетов для разработчиков
Если вы собираетесь самостоятельно разрабатывать или вносить изменения в пакеты, вам необходимо установить дополнительные пакеты.
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential Создание рабочего пространства
ROS использует специальную систему сборки под названием catkin . Чтобы использовать ее, вам необходимо создать и инициализировать папку рабочего пространства.
mkdir -p ~/catkin_ws/src cd ~/catkin_ws/src catkin_init_workspace Первый запуск
Установка для ROS завершена, следующая команда запустит сервер (главную ноду) ROS. Закройте все окна терминала и откройте новое окно терминала.
Если ROS установлена верно, то мы увидим приблизительно такое сообщение при запуске:
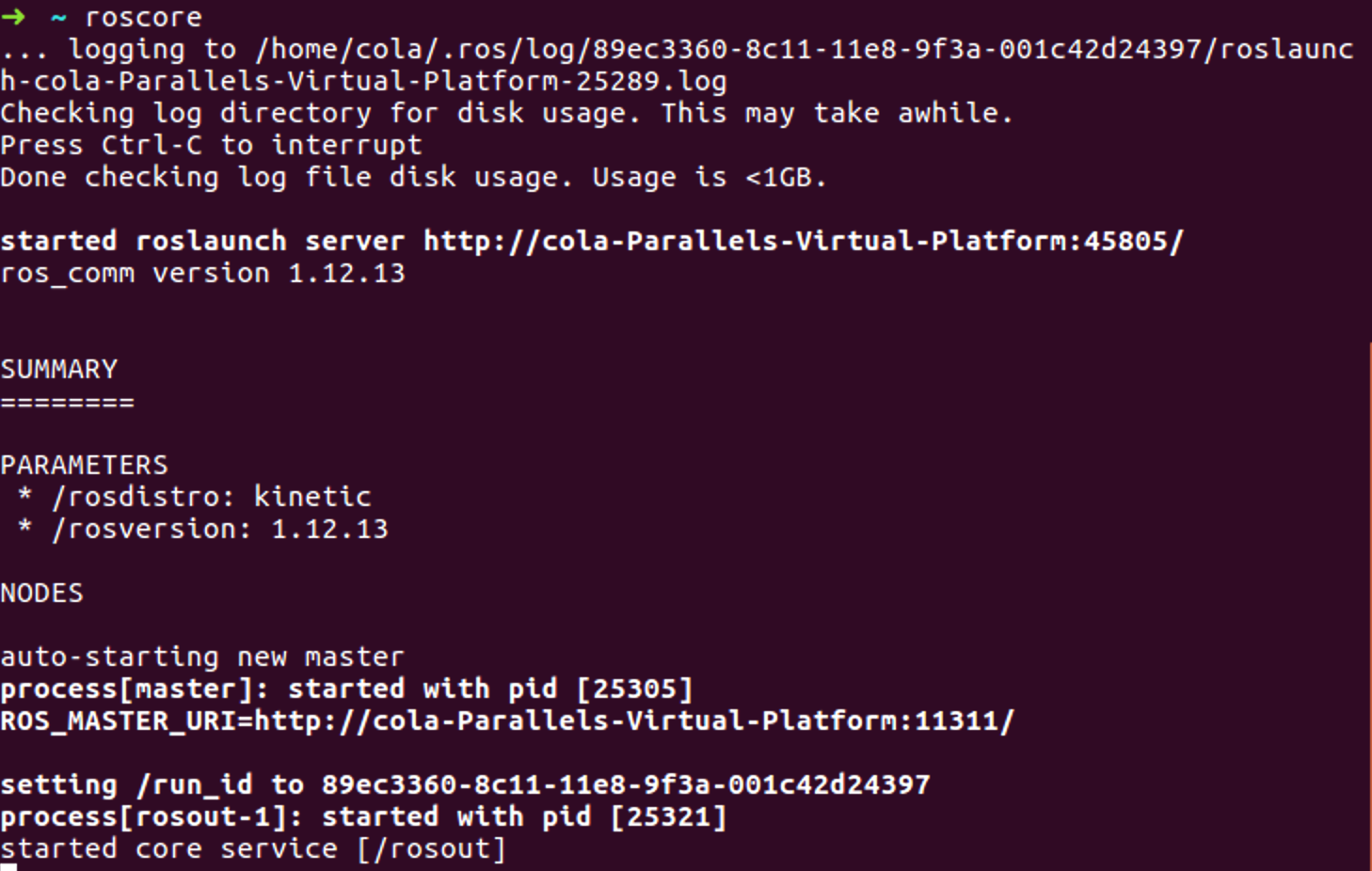
Для остановки roscore необходимо нажать Ctrl+C
Если вы хотите чтобы roscore запустился в фоновом режиме, то запустите его командой
Как установить ROS Noetic на Linux Mint 20
ROS — это аббревиатура от Robot Operating System. Такой обширный пакет предназначен для облегчения разработки приложений для робототехники. Если говорить о ROS Noetic, то это последняя доступная на рынке LTS-версия ROS, поддерживаемая системами на базе Linux. В сегодняшнем руководстве мы попытаемся установить ROS Noetic в системе Linux Mint 20.
Установка ROS Noetic на Linux Mint 20:
Если вы хотите установить ROS Noetic в своей системе Linux Mint 20, вам необходимо выполнить следующие четыре шага:
Шаг 1: Добавление официального репозитория ROS Noetic в систему:
Прежде чем делать что-либо еще, вам сначала нужно добавить официальный репозиторий ROS Noetic в вашу систему, выполнив команду, показанную ниже:
$ echo “deb http://packages.ros.org/ros/ubuntu focal main” | sudo tee /etc/apt/sources.list.d/ros-focal.list
Если вам удастся добавить официальный репозиторий ROS Noetic в вашу систему Linux Mint 20, вы увидите следующий ответ на терминале:
Шаг 2: Добавление официального брелока ROS Noetic в систему:
$ sudo apt-key adv --keyserver ‘hkp://keyserver.ubuntu.com:80’ --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
После успешного добавления официального набора ключей ROS Noetic в вашу систему вы получите следующий ответ в виде вывода на ваш терминал:

Шаг 3: Обновление системы Linux Mint 20:
После этого нам нужно будет обновить нашу систему с помощью команды, показанной ниже, чтобы новые добавленные объекты могли начать действовать:
$ sudo apt update
Шаг 4: Установка ROS Noetic в систему:
Наконец, мы можем установить ROS Noetic в нашей системе, выполнив следующую команду:
$ sudo apt install ros-noetic-desktop-full
После запуска этой команды вам нужно будет подтвердить это действие, как показано на изображении ниже, после чего полная версия ROS Noetic будет установлена в вашей системе Linux Mint 20.

Удаление ROS Noetic из Linux Mint 20:
Чтобы удалить версию ROS Noetic Full Desktop из вашей системы, вам нужно будет выполнить следующую команду:
$ sudo apt get-purge --autoremove ros-noetic-desktop-full
Вывод:
Эта статья посвящена установке ROS Noetic в системе Linux Mint 20. Как только он будет установлен в вашей системе, вы сразу же сможете начать использовать его для разработки приложений для робототехники. Более того, если вы больше не хотите использовать эту ОС, вы можете легко удалить ее из своей системы с помощью команды, которой мы поделились с вами в этом руководстве.
Рекомендуемый контент
Мы используем файлы cookie на нашем веб-сайте, чтобы предоставить вам наиболее релевантный опыт, запоминая ваши предпочтения и повторные посещения. Нажимая «Принять все», вы соглашаетесь на использование ВСЕХ файлов cookie. Однако вы можете посетить «Настройки файлов cookie», чтобы предоставить контролируемое согласие.
Privacy Overview
Этот веб-сайт использует файлы cookie, чтобы улучшить вашу работу во время навигации по веб-сайту. Из них файлы cookie, которые классифицируются как необходимые, хранятся в вашем браузере, поскольку они необходимы для работы основных функций веб-сайта. Мы также используем сторонние файлы cookie, которые помогают нам анализировать и понимать, как вы используете этот веб-сайт. Эти файлы cookie будут храниться в вашем браузере только с вашего согласия. У вас также есть возможность отказаться от этих файлов cookie. Но отказ от некоторых из этих файлов cookie может повлиять на ваш опыт просмотра.
Necessary cookies are absolutely essential for the website to function properly. These cookies ensure basic functionalities and security features of the website, anonymously.
| Cookie | Duration | Description |
|---|---|---|
| cookielawinfo-checkbox-analytics | 11 months | This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category «Analytics». |
| cookielawinfo-checkbox-functional | 11 months | The cookie is set by GDPR cookie consent to record the user consent for the cookies in the category «Functional». |
| cookielawinfo-checkbox-necessary | 11 months | This cookie is set by GDPR Cookie Consent plugin. The cookies is used to store the user consent for the cookies in the category «Necessary». |
| cookielawinfo-checkbox-others | 11 months | This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category «Other. |
| cookielawinfo-checkbox-performance | 11 months | This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category «Performance». |
| viewed_cookie_policy | 11 months | Этот файл cookie устанавливается подключаемым модулем GDPR Cookie Consent. Файлы cookie используются для хранения согласия пользователя на файлы cookie в категории «Необходимые». |
Functional cookies help to perform certain functionalities like sharing the content of the website on social media platforms, collect feedbacks, and other third-party features.
Performance cookies are used to understand and analyze the key performance indexes of the website which helps in delivering a better user experience for the visitors.
Analytical cookies are used to understand how visitors interact with the website. These cookies help provide information on metrics the number of visitors, bounce rate, traffic source, etc.
Advertisement cookies are used to provide visitors with relevant ads and marketing campaigns. These cookies track visitors across websites and collect information to provide customized ads.
Other uncategorized cookies are those that are being analyzed and have not been classified into a category as yet.
Install ROS Noetic on Linux Mint 20 — A step by step guide ?

ROS is an acronym for Robot Operating System. This kind of extensive package is designed for facilitating the development of robotics applications. If we talk about ROS Noetic, then it is the latest LTS version of ROS available in the market that is supported by Linux-based systems.
Here at LinuxAPT , as part of our Server Management Services , we regularly help our Customers to perform related robotics applications queries.
In this context, we shall look into the best way to install ROS Noetic on a Linux Mint 20 system.
Steps to Install ROS Noetic on Linux Mint 20
If you want to install ROS Noetic on your Linux Mint 20 system, then you will need to perform the outlined steps.
1. Add ROS Noetic Official Repository to the System
The first thing to do is to add the ROS Noetic official repository to your system by executing the below command:
$ echo "deb http://packages.ros.org/ros/ubuntu focal main" | sudo tee /etc/apt/sources.list.d/ros-focal.list 2. Add ROS Noetic Official Keyring to the System
Now, you need to add the ROS Noetic official keyring to your system by executing the below command:
$ sudo apt-key adv --keyserver ‘hkp://keyserver.ubuntu.com:80’ --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 After doing that, we will have to update our system with the below command so that the newly added entities can take effect:
4. Install ROS Noetic on the System
Finally, we can install ROS Noetic on our system by executing the following command:
$ sudo apt install ros-noetic-desktop-full How to Uninstall ROS Noetic from Linux Mint 20 ?
To remove ROS Noetic Full Desktop edition from your system, you will have to run the following command:
$ sudo apt get-purge --autoremove ros-noetic-desktop-full [Need assistance in fixing Linux system errors ? We can help you . ]
Conclusion
This article covers the installation of ROS Noetic on a Linux Mint 20 system. In fact, Robot Operating System (ROS or in lowercase ros) is the most widely used framework to program robots, more than 50% robots run on ROS. Once it is installed on your system, you can instantly start using it for the development of robotics applications.