Изучаем процессы в Linux
В этой статье я хотел бы рассказать о том, какой жизненный путь проходят процессы в семействе ОС Linux. В теории и на примерах я рассмотрю как процессы рождаются и умирают, немного расскажу о механике системных вызовов и сигналов.
Данная статья в большей мере рассчитана на новичков в системном программировании и тех, кто просто хочет узнать немного больше о том, как работают процессы в Linux.
Всё написанное ниже справедливо к Debian Linux с ядром 4.15.0.
Введение
Системное программное обеспечение взаимодействует с ядром системы посредством специальных функций — системных вызовов. В редких случаях существует альтернативный API, например, procfs или sysfs, выполненные в виде виртуальных файловых систем.
Атрибуты процесса
Процесс в ядре представляется просто как структура с множеством полей (определение структуры можно прочитать здесь).
Но так как статья посвящена системному программированию, а не разработке ядра, то несколько абстрагируемся и просто акцентируем внимание на важных для нас полях процесса:
- Идентификатор процесса (pid)
- Открытые файловые дескрипторы (fd)
- Обработчики сигналов (signal handler)
- Текущий рабочий каталог (cwd)
- Переменные окружения (environ)
- Код возврата
Жизненный цикл процесса
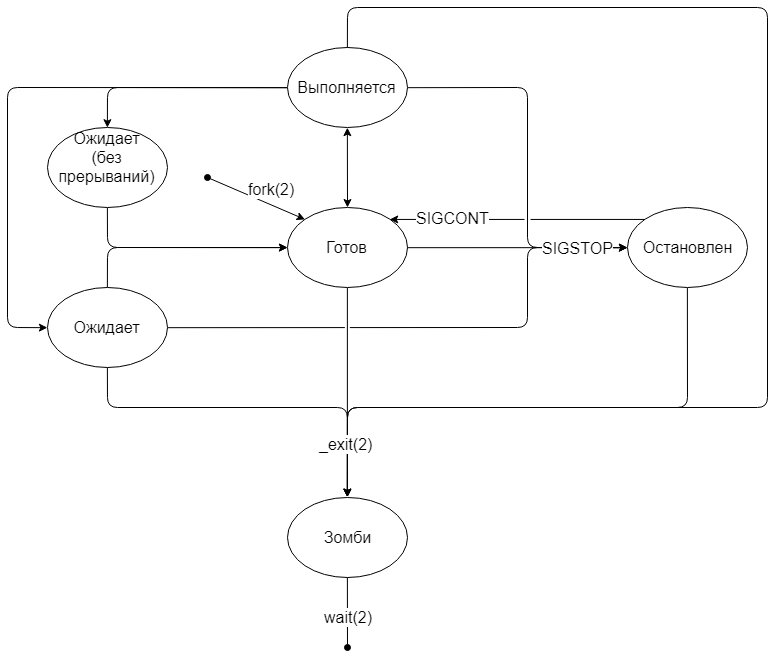
Рождение процесса
Только один процесс в системе рождается особенным способом — init — он порождается непосредственно ядром. Все остальные процессы появляются путём дублирования текущего процесса с помощью системного вызова fork(2) . После выполнения fork(2) получаем два практически идентичных процесса за исключением следующих пунктов:
- fork(2) возвращает родителю PID ребёнка, ребёнку возвращается 0;
- У ребёнка меняется PPID (Parent Process Id) на PID родителя.
#include #include #include #include #include int main() < int pid = fork(); switch(pid) < case -1: perror("fork"); return -1; case 0: // Child printf("my pid = %i, returned pid = %i\n", getpid(), pid); break; default: // Parent printf("my pid = %i, returned pid = %i\n", getpid(), pid); break; >return 0; > $ gcc test.c && ./a.out my pid = 15594, returned pid = 15595 my pid = 15595, returned pid = 0 Состояние «готов»
Сразу после выполнения fork(2) переходит в состояние «готов».
Фактически, процесс стоит в очереди и ждёт, когда планировщик (scheduler) в ядре даст процессу выполняться на процессоре.
Состояние «выполняется»
Как только планировщик поставил процесс на выполнение, началось состояние «выполняется». Процесс может выполняться весь предложенный промежуток (квант) времени, а может уступить место другим процессам, воспользовавшись системным вывозом sched_yield .
Перерождение в другую программу
В некоторых программах реализована логика, в которой родительский процесс создает дочерний для решения какой-либо задачи. Ребёнок в данном случае решает какую-то конкретную проблему, а родитель лишь делегирует своим детям задачи. Например, веб-сервер при входящем подключении создаёт ребёнка и передаёт обработку подключения ему.
Однако, если нужно запустить другую программу, то необходимо прибегнуть к системному вызову execve(2) :
int execve(const char *filename, char *const argv[], char *const envp[]); или библиотечным вызовам execl(3), execlp(3), execle(3), execv(3), execvp(3), execvpe(3) :
int execl(const char *path, const char *arg, . /* (char *) NULL */); int execlp(const char *file, const char *arg, . /* (char *) NULL */); int execle(const char *path, const char *arg, . /*, (char *) NULL, char * const envp[] */); int execv(const char *path, char *const argv[]); int execvp(const char *file, char *const argv[]); int execvpe(const char *file, char *const argv[], char *const envp[]); Все из перечисленных вызовов выполняют программу, путь до которой указан в первом аргументе. В случае успеха управление передаётся загруженной программе и в исходную уже не возвращается. При этом у загруженной программы остаются все поля структуры процесса, кроме файловых дескрипторов, помеченных как O_CLOEXEC , они закроются.
Как не путаться во всех этих вызовах и выбирать нужный? Достаточно постичь логику именования:
- Все вызовы начинаются с exec
- Пятая буква определяет вид передачи аргументов:
- l обозначает list, все параметры передаются как arg1, arg2, . NULL
- v обозначает vector, все параметры передаются в нуль-терминированном массиве;
#define _GNU_SOURCE #include int main() < char* args[] = < "/bin/cat", "--help", NULL >; execve("/bin/cat", args, environ); // Unreachable return 1; >$ gcc test.c && ./a.out Usage: /bin/cat [OPTION]. [FILE]. Concatenate FILE(s) to standard output. *Вывод обрезан*Семейство вызовов exec* позволяет запускать скрипты с правами на исполнение и начинающиеся с последовательности шебанг (#!).
#define _GNU_SOURCE #include int main() < char* e[] = ; execle("/tmp/test.sh", "test.sh", NULL, e); // Unreachable return 1; >$ cat test.sh #!/bin/bash echo $0 echo $PATH $ gcc test.c && ./a.out /tmp/test.sh /habr:/rulezЕсть соглашение, которое подразумевает, что argv[0] совпадает с нулевым аргументов для функций семейства exec*. Однако, это можно нарушить.
#define _GNU_SOURCE #include int main() < execlp("cat", "dog", "--help", NULL); // Unreachable return 1; >$ gcc test.c && ./a.out Usage: dog [OPTION]. [FILE]. *Вывод обрезан*Любопытный читатель может заметить, что в сигнатуре функции int main(int argc, char* argv[]) есть число — количество аргументов, но в семействе функций exec* ничего такого не передаётся. Почему? Потому что при запуске программы управление передаётся не сразу в main. Перед этим выполняются некоторые действия, определённые glibc, в том числе подсчёт argc.
Состояние «ожидает»
Некоторые системные вызовы могут выполняться долго, например, ввод-вывод. В таких случаях процесс переходит в состояние «ожидает». Как только системный вызов будет выполнен, ядро переведёт процесс в состояние «готов».
В Linux так же существует состояние «ожидает», в котором процесс не реагирует на сигналы прерывания. В этом состоянии процесс становится «неубиваемым», а все пришедшие сигналы встают в очередь до тех пор, пока процесс не выйдет из этого состояния.
Ядро само выбирает, в какое из состояний перевести процесс. Чаще всего в состояние «ожидает (без прерываний)» попадают процессы, которые запрашивают ввод-вывод. Особенно заметно это при использовании удалённого диска (NFS) с не очень быстрым интернетом.Состояние «остановлен»
В любой момент можно приостановить выполнение процесса, отправив ему сигнал SIGSTOP. Процесс перейдёт в состояние «остановлен» и будет находиться там до тех пор, пока ему не придёт сигнал продолжать работу (SIGCONT) или умереть (SIGKILL). Остальные сигналы будут поставлены в очередь.
Завершение процесса
Ни одна программа не умеет завершаться сама. Они могут лишь попросить систему об этом с помощью системного вызова _exit или быть завершенными системой из-за ошибки. Даже когда возвращаешь число из main() , всё равно неявно вызывается _exit .
Хотя аргумент системного вызова принимает значение типа int, в качестве кода возврата берется лишь младший байт числа.Состояние «зомби»
Сразу после того, как процесс завершился (неважно, корректно или нет), ядро записывает информацию о том, как завершился процесс и переводит его в состояние «зомби». Иными словами, зомби — это завершившийся процесс, но память о нём всё ещё хранится в ядре.
Более того, это второе состояние, в котором процесс может смело игнорировать сигнал SIGKILL, ведь что мертво не может умереть ещё раз.Забытье
Код возврата и причина завершения процесса всё ещё хранится в ядре и её нужно оттуда забрать. Для этого можно воспользоваться соответствующими системными вызовами:
pid_t wait(int *wstatus); /* Аналогично waitpid(-1, wstatus, 0) */ pid_t waitpid(pid_t pid, int *wstatus, int options);Вся информация о завершении процесса влезает в тип данных int. Для получения кода возврата и причины завершения программы используются макросы, описанные в man-странице waitpid(2) .
#include #include #include #include #include int main() < int pid = fork(); switch(pid) < case -1: perror("fork"); return -1; case 0: // Child return 13; default: < // Parent int status; waitpid(pid, &status, 0); printf("exit normally? %s\n", (WIFEXITED(status) ? "true" : "false")); printf("child exitcode = %i\n", WEXITSTATUS(status)); break; >> return 0; >$ gcc test.c && ./a.out exit normally? true child exitcode = 13Передача argv[0] как NULL приводит к падению.
#include #include #include #include #include int main() < int pid = fork(); switch(pid) < case -1: perror("fork"); return -1; case 0: // Child execl("/bin/cat", NULL); return 13; default: < // Parent int status; waitpid(pid, &status, 0); if(WIFEXITED(status)) < printf("Exit normally with code %i\n", WEXITSTATUS(status)); >if(WIFSIGNALED(status)) < printf("killed with signal %i\n", WTERMSIG(status)); >break; > > return 0; >$ gcc test.c && ./a.out killed with signal 6Бывают случаи, при которых родитель завершается раньше, чем ребёнок. В таких случаях родителем ребёнка станет init и он применит вызов wait(2) , когда придёт время.
После того, как родитель забрал информацию о смерти ребёнка, ядро стирает всю информацию о ребёнке, чтобы на его место вскоре пришёл другой процесс.
Благодарности
Спасибо Саше «Al» за редактуру и помощь в оформлении;
Спасибо Саше «Reisse» за понятные ответы на сложные вопросы.
Они стойко перенесли напавшее на меня вдохновение и напавший на них шквал моих вопросов.