- What is the difference among three priorities used in Linux kernel?
- What is the difference among three priorities used in Linux kernel?
- Practical use of Linux real time scheduling priorities (SCHED_FIFO and SCHED_RR)?
- Among these two in my ps output, which real-time process will be preempted over the other by linux?
- Changing Priority on Linux Processes
- Checking the Priority of Running Processes
- Setting priority on new processes
- Setting Priority on Existing Processes
- Setting Permanent Priority on all Processes for a Specific User
- what is the difference among three priorities used in Linux kernel?
What is the difference among three priorities used in Linux kernel?
I’m not sure how conformant Linux is on honoring these requirements, but you should at least start out by making sure your code is correct to the specification, then adjust it as needed. Solution: That’s because and have fixed static priorities in the range 1-99: RedHat MRG docs on rt For realtime priorities, the order is reversed: 99 is indeed the highest one, contrary to the usual «lower is higher». According to proc man: Priority is the amount of time that a process waited-for children have been scheduled in kernel mode, it is measured in clock ticks.
What is the difference among three priorities used in Linux kernel?
Disclaimer : Following is true for scheduling in linux (I am not sure about windows or other OS). Thread and process has been used interchangeably here, althogh there is a difference in between them.
Priorities & differences
1.Static priority : These are the default priorities (value 0 for conventional processes aka non-real time processes ie when real time scheduling is not used) set while creating a new thread. You can change them using:
`pthread_setschedparam(pthread_t thread, int policy, const struct sched_param *param);` where, sched_param contains the priority:
2 Dynamic priority : When threads start to starve because higher priority threads being scheduled all the time, there becomes a need to raise the priority of such a thread using various mechanisms. This raised/lowered (yes, this happens too) priority is known as the dynamic priority because it keeps on changing. In Linux, even the fat kid gets to play.
3.Real time priority : This comes into picture only when threads (processes) are scheduled under one of the real-time policies (SCHED_FIFO, SCHED_RR) and have a sched_priority value in the range 1 (low) to 99 (high). This is the highest in comparison to the static/dynamic priorities of non real time processes.
More information: http://man7.org/linux/man-pages/man3/pthread_getschedparam.3.html
Now, to your questions:
Correct me if i am wrong and please also tell me why we are using three types of priorities in Linux and what are the differences among these priorities?
So, for non-real time scheduling policies, every process has some static priorities, a higher priority gives the thread a kick-start, and later to avoid any injustice, the priority is boosted/lowered which becomes the dynamic priority.
Are the processes are differentiated as Real time or Conventional on the basis of priorities that is if priority is between 100 to 139 then processes are Conventional processes otherwise Real time processes?
Not really, it depends upon the scheduling mechanism in place.
How the priorities are changed in Linux , i mean , we know that priority of a process does not remain constant through out the execution ?
That’s when the dynamicness comes into picture. Read about the «nice value» in the given links.
What is the difference among three priorities used in, In Linux, even the fat kid gets to play. 3.Real time priority: This comes into picture only when threads (processes) are scheduled under one of the real-time policies (SCHED_FIFO, SCHED_RR) and have a sched_priority value in the range 1 (low) to 99 (high). This is the highest in comparison to the …
Practical use of Linux real time scheduling priorities (SCHED_FIFO and SCHED_RR)?
sched_setscheduler sets the scheduler of the process , not the thread. See:
If you want to set the scheduler for a thread, you need to use the pthread_attr_setschedpolicy and pthread_attr_setschedparam functions on the attribute object for the new thread before you create it.
I’m not sure how conformant Linux is on honoring these requirements, but you should at least start out by making sure your code is correct to the specification, then adjust it as needed.
C — Real-time programming with Linux, In particular, your rtprio rlimit must be set to the highest priority you will need. Alternatively, you can run the application as root. In a linux system with PAM, this is typically accomplished by adding the appropriate line to /etc/security/limits.conf @realtime — rtprio 99 Usage example@realtime — rtprio 99Feedback
I am wondering why top and htop don’t display -100 for highest priority real time processes ?
That’s because SCHED_RR and SCHED_FIFO have fixed static priorities in the range 1-99: RedHat MRG docs on rt
For realtime priorities, the order is reversed: 99 is indeed the highest one, contrary to the usual «lower is higher».
Per your comment I misunderstood your question, sorry.
There is only one column in top, so differentiating the RT priorities from the other ones would not be possible. To get around this, «rt» is used to indicate that these processes use a realtime scheduler class.
You can see the difference using ps ax —format uname,pid,ppid,tty,cmd,cls,pri,rtprio , which will give you 2 columns, one for the prio and the other one for rtprio.
Sidenote: The aforementioned command will also show you the scheduler class the process uses (the cls field).
Priority of process in Linux, You can observe that nice value of process (PID = 2371) is 0, now let’s try to set the new priority of 5 to this process. renice 5 2371. Output: 2371 (process ID) old priority 0, new priority 5. You can also see this priority using top command (see highlighted line in image). process 2371 has nice value 5.
Among these two in my ps output, which real-time process will be preempted over the other by linux?
Priority is the amount of time that a process waited-for children have been scheduled in kernel mode, it is measured in clock ticks. A value in the range 19 (low priority) to -20 (high priority). Process can be running under real-time or non-real time priorities.
- For processes running a real-time scheduling policy (i.e. the scheduler is the kernel component that decides which runnable process will be executed by the CPU next. Each process has an associated scheduling policy and a static scheduling priority, sched_priority; these are the settings that are modified by sched_setscheduler() . The scheduler makes it decisions based on knowledge of the scheduling policy and static priority of all processes on the system.), this is the negated scheduling priority, minus one; that is, a number in the range -2 to -100, corresponding to real-time priorities 1 to 99.
- For processes running under a non-real-time scheduling policy, this is the raw nice value (i.e. the scheduling priority of the process, process group, or user, as indicated by which and who is obtained with the getpriority() call and set with the setpriority() call.) as represented in the kernel. The kernel stores nice values (i.e. column NI in the ps table as numbers in the range 0 (high) to 39 (low), corresponding to the user-visible nice range of -20 to 19.
How to choose thread/process priority in real-time Linux?, Kernel threads? Yes, all the tasks in brackets are kernel threads. At what priority should I make my software run? From 2-69 for normal RT, and 90-98 for your very high priority application threads. The latter will block all IRQ handlers, so try to do as little as possible at high priority. Source.
Changing Priority on Linux Processes

When talking about processes priority is all about managing processor time. The Processor or CPU is like a human juggling multiple tasks at the same time. Sometimes we can have enough room to take on multiple projects. Sometimes we can only focus on one thing at a time. Other times something important pops up and we want to devote all of our energy into solving that problem while putting less important tasks on the back burner.
In Linux we can set guidelines for the CPU to follow when it is looking at all the tasks it has to do. These guidelines are called niceness or nice value. The Linux niceness scale goes from -20 to 19. The lower the number the more priority that task gets. If the niceness value is high number like 19 the task will be set to the lowest priority and the CPU will process it whenever it gets a chance. The default nice value is zero.
By using this scale we can allocate our CPU resources more appropriately. Lower priority programs that are not important can be set to a higher nice value, while high priority programs like daemons and services can be set to receive more of the CPU’s focus. You can even give a specific user a lower nice value for all of his/her processes so you can limit their ability to slow down the computer’s core services.
Checking the Priority of Running Processes
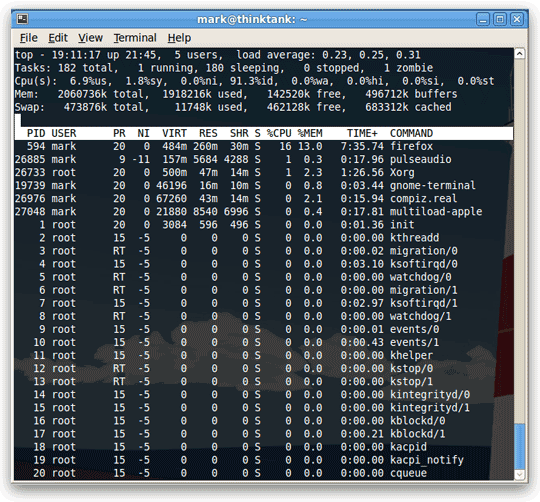
The easiest way to get a quick picture of what the current niceness priority on a process is to open up the top processes with:
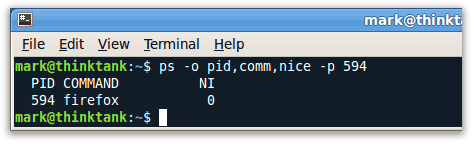
Another way you can get the nice value is use ps:
This will output the process ID, command, and nice value (marked as NI).
Setting priority on new processes
At this point you are probably wondering how you can set your own priority levels on processes. To change the priority when issuing a new command you do nice -n [nice value] [command]:
This will increment the default nice value by a positive 10 for the command, ‘apt-get upgrade’ This is often useful for times when you want to upgrade apps but don’t want the extra process burden at the given time. Remember a positive number is gives less priority for a process.
Setting Priority on Existing Processes
Obviously at some point you are going to want to alter the nice value of something that is already running. Just the other day I was doing an upgrade to Ubuntu Jaunty and Firefox started to become unusably slow. A quick renice command rescheduled the upgrade to a lower priority and I was back to surfing in no time.
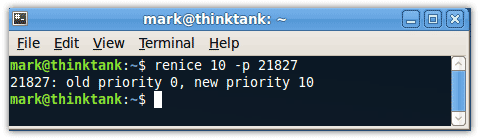
To change the priority of an existing process just do renice [nice value] -p [process id]:
This will increment the priority of the process with an id of 21827 to 10.
Note: Only root can apply negative nice values.
Setting Permanent Priority on all Processes for a Specific User
Sometimes it is helpful to give specific users lower priority than others to keep system resources allocated in the proper places like core services and other programs.
You can set the default nice value of a particular user or group in the /etc/security/limits.conf file.
It uses this syntax: [username] [hard|soft] priority [nice value]
backupuser hard priority 1 what is the difference among three priorities used in Linux kernel?
Disclaimer: Following is true for scheduling in linux (I am not sure about windows or other OS). Thread and process has been used interchangeably here, althogh there is a difference in between them.
Priorities & differences
1.Static priority: These are the default priorities (value 0 for conventional processes aka non-real time processes ie when real time scheduling is not used) set while creating a new thread. You can change them using:
`pthread_setschedparam(pthread_t thread, int policy, const struct sched_param *param);` where, sched_param contains the priority:
2 Dynamic priority: When threads start to starve because higher priority threads being scheduled all the time, there becomes a need to raise the priority of such a thread using various mechanisms. This raised/lowered (yes, this happens too) priority is known as the dynamic priority because it keeps on changing. In Linux, even the fat kid gets to play.
3.Real time priority: This comes into picture only when threads (processes) are scheduled under one of the real-time policies (SCHED_FIFO, SCHED_RR) and have a sched_priority value in the range 1 (low) to 99 (high). This is the highest in comparison to the static/dynamic priorities of non real time processes.
Now, to your questions:
Correct me if i am wrong and please also tell me why we are using three types of priorities in Linux and what are the differences among these priorities?
So, for non-real time scheduling policies, every process has some static priorities, a higher priority gives the thread a kick-start, and later to avoid any injustice, the priority is boosted/lowered which becomes the dynamic priority.
Are the processes are differentiated as Real time or Conventional on the basis of priorities that is if priority is between 100 to 139 then processes are Conventional processes otherwise Real time processes?
Not really, it depends upon the scheduling mechanism in place.
How the priorities are changed in Linux , i mean , we know that priority of a process does not remain constant through out the execution ?
That’s when the dynamicness comes into picture. Read about the «nice value» in the given links.