ИНТЕРФЕЙС СAN. ТОПОЛОГИЯ СЕТИ.
Звезда(1), Дерево(2),Общая шина(3),Кольцо(4)
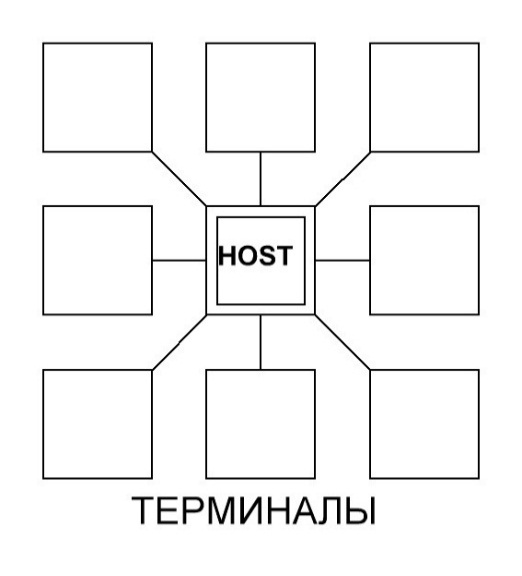
Звезда(1)Характеризуется наличием терминалов, каждый из которых непосредственно соединяется с центральным коммутатором(Switch).Данную топологию используют предприятия с высокой степенью концентрации терминалов и небольшим расстоянием до них.
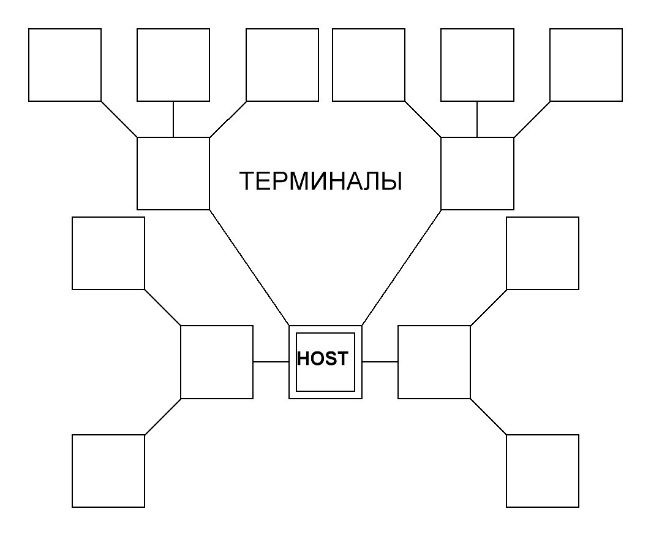 Дерево(2)образуется путем соединения нескольких топологий «Звезда» для образования сети.Такая топология используется для сложных(больших) предприятий, которые целесобразно разбить на более мелкие структуры
Дерево(2)образуется путем соединения нескольких топологий «Звезда» для образования сети.Такая топология используется для сложных(больших) предприятий, которые целесобразно разбить на более мелкие структуры
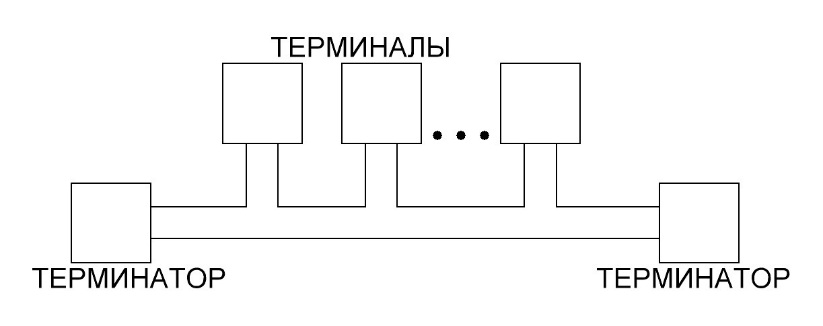
Общая шина(3) Используются коммутаторы непосредственно у терминалов или коммутаторы, интегрированные в терминалы. Для обеспечения работоспособности сети протокол обмена должен предусмотреть, что бы лишь один терминал был активирован в данный момент времени. Перед активацией очередного терминала должна быть уверенность в том,что ни один из терминалов не активирован.
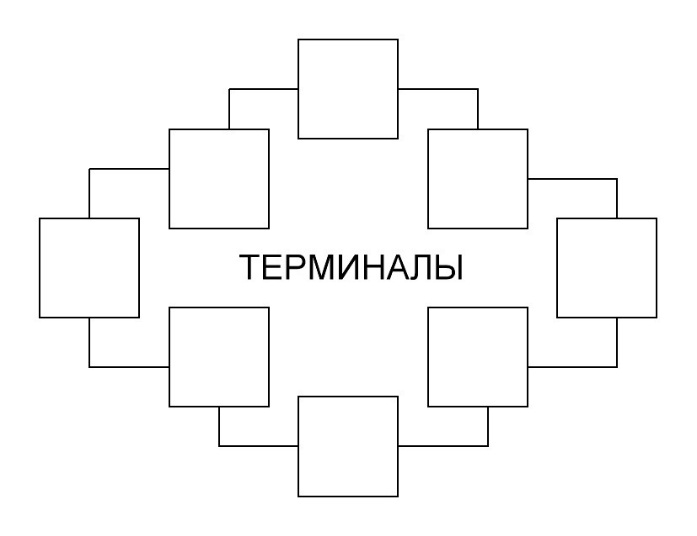
Кольцо(4)Образуется соединением концов шинной структуры с помощью дополнительного коннектора. Используемый протокол должен обеспечивать коммутацию между различными терминалами без наложения сообщений.
Кольцевая типология используется в системах с высокими требованиями к работоспособности, которая обеспечивается в случае обрыва линии или выхода из строя отдельных сетевых компонентов.
Этот протокол является стандартом ISO 11878. Первоначально CAN был разработан для автомобильной промышленности, но в настоящее время быстро внедряется в область промышленной автоматизации. Стандарт CAN состоит из физического уровня и уровня передачи данных который определяет различия типов сообщений, правил разрешения конфликтов, защита от сбоев. Кратко может быть охарактеризован следующим образом:
1. Физический уровень использует диффер передачу данных, как и RS485
2. Для управления доступом к шине используется принцип разрешения конфликтов
Сообщения имеют малый размер (обычно 8 байт) и защищены контрольной суммой. В сообщениях отсутствует явные адреса и вместо этого каждое сообщение содержит числовое значение, которое управляет его очередностью на шине.
Сама задача протокола CAN это передать малые пакеты данных из точки в точку В по средствам коммутационной среды. Сам протокол не оговаривает как необходимо управлять потоками данных, в протоколе говорится лишь о том количестве данных необходимых поместить в 8 байтовое сообщение. Также в протоколе не оговаривается не форма адреса не как устанавливается соединение.
Кабель витой пары в сети CAN должен иметь общий (третий) провод; на обоих концах витой пары должны быть согласующие резисторы, сопротивление которых равно волновому сопротивлению кабеля. Максимальная длина кабеля составляет 1 км. Для увеличения длины, количества узлов или гальванической развязки могут быть использованы повторители интерфейса, сетевые мосты и шлюзы.
Витая пара может быть в экране или без, в зависимости от электромагнитной обстановки. Топология сети должна быть шинной, максимальная длина отвода от шины при скорости передачи 1 Мбит/с не должна превышать 30 см. Длину отвода можно рассчитать по формуле
где Тф- длительность переднего фронта передатчика. Основные требования к линии передачи и ее характеристикам близки к RS-485, однако в передатчиках CAN есть режим управления длительностью фронтов импульсов.
Управление выполняется путем заряда емкостей затворов выходных транзисторов от источников тока, при этом величина тока задается внешним резистором. Увеличение длительности фронта позволяет снизить требования к согласованию линии на низких частотах, увеличить длину отводов и ослабить излучение электромагнитных помех.
Выводы «земли» всех передатчиков сети должны быть соединены в одну точку (если интерфейсы гальванически не изолированы). При этом разность потенциалов между выводами заземлений не должна превышать 2 В. Гальваническая изоляция рекомендуется при длине линии более 200 м, но не является обязательным требованием стандарта.
Для электрического соединения устройств с CAN интерфейсом стандарт предусматривает два варианта. Первый вариант состоит в применении Т-образных разветвителей, которые состоят из трех 9-штырьковых разъемов D-sub, расположенных в одном корпусе, одноименные контакты которых соединены между собой. Разветвители имеют один разъем со штырьками и два — с гнездами.
Второй вариант требует наличия в каждом CAN-устройстве двух разъемов. Для включения устройства в сеть кабель разрезают и на его концах устанавливают ответные части разъемов. Устройство включается буквально в разрыв линии передачи. Такой подход позволяет наращивать количество устройств и изменять топологию сети путем добавления в разрыв кабеля новых устройств и кабеля с разъемами на концах. Один из разъемов должен быть со штырьками, второй — с гнездами. Подключение устройств к шине без разъемов не допускается. Согласующий резистор должен располагаться внутри разъема, который подключается к концу кабеля. Для присоединения модулей к CAN-шине должен использоваться 9-штырьковый разъем типа D- Sub. На модуле устанавливается разъем с гнездами, на соединяющем кабеле — со штырьками.
| Контакт | Сигнал | Примечание |
| 1 | — | Зарезервирован |
| 2 | CAN_ L | Сигнал линии |
| 3 | CAN_ GND | «Земля» |
| 4 | — | Зарезервирован |
| 5 | (CAN_ SHLD) | Экран кабеля (не обязательно) |
| 6 | (GND) | «Земля» (не обязательно) |
| 7 | CAN_ H | Сигнал линии |
| 8 | — | Зарезервирован |
| 9 | (CAN_ V+) | Внешнее питание (не обязательно, для питания передатчиков с гальванической изоляцией) |
Примечание. В каждом модуле контакты 3 и 6 должны быть соединены
Применение разъемов со штырьками или гнездами определяется следующим правилом: при «горячей» замене модулей питание должно оставаться только на разъемах с гнездами; это позволяет избежать случайного короткого замыкания.
Стандарт устанавливает следующие скорости обмена: 1 Мбит/с, 800 кбит/с, 500 кбит/с, 250 кбит/с, 125 кбит/с, 50 кбит/с, 20 кбит/с. CAN-модули могут поддерживать не все скорости, но желательно, чтобы их количество было наибольшим.
При подаче уровня логического нуля на вход TxD (вход является инвертирующим) оба транзистора выходного каскада передатчика открываются и через нагрузку (два резистора по 120 Ом) течет ток, создающий в линии состояние, соответствующее логической единице. При этом потенциал вывода CAN_H всегда будет выше, чем вывода CAN_L. При логической единице на входе передатчика его выход переходит в высокоомное состояние и дифференциальное напряжение на линии становится равным нулю. Наличие терминальных резисторов в CAN необходимо не только для согласования линии, нои для создания пути протекания тока.CAN передатчик имеет очень важное свойство: если один из передатчиков устанавливает в сети логический ноль, а второй — логическую единицу, то это состояние не является аварийным, поскольку сквозного тока не возникает. Это свойство CAN обеспечивает возможность получения доступа к линии, сравнивая посылаемые в линию логические уровни с тем уровнем, который фактически устанавливается в ней: если передатчик посылает в линию рецессивное состояние, а в ней при этом остается доминантное, значит линия занята. Доступ получает тот узел сети, который может предоставить ей доминантный уровень сигнала. Узлы с рецессивным уровнем покидают линию и ждут следующего случая. Опорное напряжение позволяет установить пороговое напряжение для входа TxD и уровень синфазного напряжения в линии, когда она находится в состоянии 1 . Обычно Vref = 2,5 В.Если сигнал TxD является доминирующим слишком долго (более 1 мс), генератор импульса таймаута временно отключает передатчик, поскольку в противном случае модуль может быть навсегда блокирован средствами канального уровня как отказавший.
Стандартом предусмотрена возможность подключения к CAN сети любого количества устройств, однако практически оно ограничивается нагрузочной способностью передатчиков или задержкой в повторителях.
В CAN-трансивере имеется генератор синхроимпульсов с частотой 16 МГц ±0,1%.
Сообщения в CAN передаются с помощью фреймов (блоков данных). Используется два разных формата фреймов, которые различаются длиной поля идентификатора: стандартный фрейм с идентификатором длиной 11 бит и расширенный фрейм с длиной идентификатора 29 бит.
Существует 4 различных типа фреймов:
o DATA FRAME — «фрейм данных» — переносит данные от передатчика к приемнику;
o REMOTE FRAME — «дистанционный фрейм» (фрейм вызова) — передается одним из устройств для того, чтобы получить от другого устройства данные в формате DATA FRAME с тем же идентификатором, что и в REMOTE FRAME;
o ERROR FRAME — «фрейм ошибок» — передается любым устройством, обнаружившим ошибку на шине;
o OVERLOAD FRAME — «фрейм перегрузки» — используется для запроса дополнительной задержки между предыдущими и последующими данными.
Дата добавления: 2018-05-12 ; просмотров: 495 ; Мы поможем в написании вашей работы!